5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
标题:
转摘“一种无位置传感器无刷直流电机驱动电路”
[打印本页]
作者:
ouxg55
时间:
2006-5-17 21:22
标题:
转摘“一种无位置传感器无刷直流电机驱动电路”
一种无位置传感器无刷直流电机驱动电路
范承志,王宇峰,林小娥,陈永校
(浙江大学,浙江 杭州 310027)
摘 要:介绍了一种无位置传感器无刷直流电机驱动电路。通过检测绕组中转子位置的电势信号实现电子换相。对开关通断引起的脉冲进行处理,以消除位置信号的干扰。功放电路的控制逻辑由EPROM译码完成,简化了逻辑电路。延时起动电路保证电机从静止状态实现软起动。
关键词:无刷直流电机;无位置传感器;驱动电路
1 引 言
永磁无刷直流电机无位置传感器驱动是一种常用的驱动方式[1]。利用永磁转子在定子绕组中感应的电势变化来检测转子位置,电势信号用于功率管的通断控制,这是无位置传感器驱动的主要方法,它可适用于任何形式转子的无刷直流电机驱动。利用转子反电势来检测转子位置需解决二个问题[2]。一是由于电机在静止和低速情况下,绕组感应电势无法存在,电机绕组在换相关断时会在该绕组中引起较大的脉冲感应电势。如何消除干扰脉冲也是驱动系统设计的重要环节。
2 驱动系统原理线路
图1是无刷直流电机的驱动电路示意图,可分为起动延时电路、逻辑分配电路、功率驱动电路和转子反电势检测整形电路4部分。
闭合开关K,电机从静止起动时,绕组电势为零,因此转子位置信号无法检测出来。该驱动系统带有一套起动电路,主要由压控振荡器和相序逻辑分配器组成,可使电机在起动时,无位置信号情况下由外部震荡电路来实现起动。考虑到电机转子的惯量,在电机起动时由RC延时电路调节震荡器输入电压,使起动频率由低到高逐步升高。
压控震荡器输出信号经分频电路及2-6进制循环记数器送到EPROM作地址码。三相星型功放电路的驱动逻辑分配由EPROM完成,驱动信号代码预先写入EPROM中。在三相星形连接二相驱动时(见图1),写入EPROM6个单元的代码为11H,41H,42H,0AH,0CH,14H。在循环计数器的控制下,依次送出相应的控制状态导通各相,使电机从静止逐步升速。地址线A7为转向控制信号,当A7为高电平时,输出为较高地址单元的6个反相循环代码,使电机反转。采用EPROM逻辑分配器的好处在于简化了逻辑控制电路。
随着电机速度的增加,绕组反电势幅值增大,检测和处理单元输出位置控制信号。此时,RC起动延时电路电容输出电压上升到较大值。运行切换比较器输出变为低电平,比较器把起动电路逻辑信号封锁,把位置反馈信号通过逻辑开关接到EPROM的地址控制线。此时EPROM输出编码由位置反电势信号控制,电机转入位置反馈闭环运行方式。
闭环方式位置信号和触发逻辑的对应代码预先写入EPROM中。比较器输出除了用于控制切换以外还接在EPROM的一根地址线,这主要是为了避免二种控制方式的代码在EPROM的单元中重叠。把EPROM不使用的存储单元写入特定的代码00H(对应于关闭6个功率管),以防逻辑出错而烧毁线路。
3 绕组电势检测处理
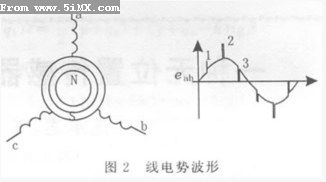
本文涉及的是星型连接的无刷电机,检测的是线电势。图2是电机在低速开环状态下的线电势波形。由于相绕组在开关关断时会感应出脉冲电势,因此线电势中包含了一些较大的脉冲波。由分析可知,图2中AB相电势包含的脉冲1、2、3分别对应于功率管d、b、f关断时的状态。从图2中可看出,由于电机处于低速开环状态,每相触发时间被滞后了近30°。尽管这种方式减少了平均力矩,但在电机带负载起动时,对于防止失步是有一定好处的。
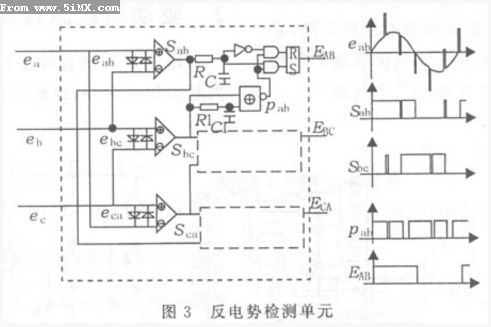
考虑到线电势超前于相电势30°,因此线电势过零点可用来控制功率管的开通和关断。图3是反电势检测和整型电路的原理图。3个线电势经比较器转换后,成为对应的方波信号。由于换相脉冲电势的影响,在方波信号中存在干扰脉冲。检测线路必须消去这些干扰。线电势信号eab经比较器变成方波信号Sab。该方波信号中包含2个脉冲干扰。BC相的Sbc信号送到异或门,在方波信号的上升和下降变化点产生一定宽度的低电平脉冲。调节R1,C1,使该脉冲宽度大于反电势中的干扰脉冲宽度。该脉冲信号刚好用来封锁AB相的干扰信号。当脉冲信号为低电平时锁存原信号。这样通过延时脉冲消除了干扰信号,在触发器的输出端获得一个完整的位置信号。RC组成的延时电路延时约1ms左右,主要是为了防止锁存误信号。
获得位置信号后,闭环运行的换相控制过程可通过EPROM的译码来完成。只要简单地把3个位置信号接到EPTOM的地址线,并对应地在EPROM的单元中写入所需的控制逻辑,即可完成闭环控制。由分析可知,在图1连线下,电机正转时写入EPROM对应单元0020H,0030H,0010H,0018H,0008H,0028H的代码为11H,41H,42H,0AH,0CH,14H。
4 结 语
驱动电路经配套电机测试,实现了预定的控制功能。测试电机电压为12V,转速12 000r/min,功率10W,环型磁钢转子,三相星型连接绕组。
采用反电势位置检测和EPROM逻辑控制器,使驱动电路简单可靠。软起动电路使电机在无电势情况下顺利起动,并在一定转速时切换到位置闭环运行。电势滤波电路消除了由于绕组换相引起的干扰脉冲,防止了位置信号的差错。
参考文献:
[1]N.Matsui.Sensorless PM Brushless DC Motor Driver[J].IEEE-IndustrialElectronics,1996,43,300.
[2]邹继斌.无位置传感器无刷直流电机驱动电路的研究[J].微电机,1999,32(2),16.
作者:
alkkk
时间:
2006-5-17 22:36
好象在那儿见过,学习.........
作者:
palm
时间:
2006-5-18 09:42
只不过是研究生的毕业论文的缩写版,对我们模型没什么帮助。
作者:
ouxg55
时间:
2006-5-18 19:49
原帖由
palm
于 2006-5-18 09:42 发表
只不过是研究生的毕业论文的缩写版,对我们模型没什么帮助。
应该是本科生。
对于想做无刷电调的DX可有借鉴意义。
欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://bbs.5imx.com/)
Powered by Discuz! X3.3