z1005890995 发表于 2015-12-18 15:01 设置里面做了高频滤波就可以起到减震效果,实际使用中从没用过物理减震,一直飞得好稳的 config——attitude里面有个滤波选项,打勾的,设置0.10——0.15即可 |
oakli 发表于 2015-12-17 11:14 已经调试好了首飞成功,我现在给飞控加了个减震球如何有必要么? 下一步打算把香蕉头都去了,线剪短减轻重量。 |
 来自苹果客户端
来自苹果客户端|
学习了,固直双飞的,看有早买了摄像头图传接收准备入坑的顶!! |
|
正反牙也就是针对自锁浆设计的~后来沿用下来了,如果不是自锁浆其实是可以忽略,前提是你浆螺丝要上紧些。炸鸡后检查下有没有松动~ |
|
欢迎入坑。 |
|
1234电机分别是顺逆顺逆。 你这是机械猫的架子?有点沉啊,你装完全部多重? |
|
你没有按照地面站提示做么? 装好后可以举过头顶,推一点油门感觉一下,看是否按照摇杆指令工作,如平飞的时候向右倾应能感到有一点反向力量要修正你的动作,说明飞控及马达设置正确,此时再试飞就可以了。 |
|
学习了 |
|
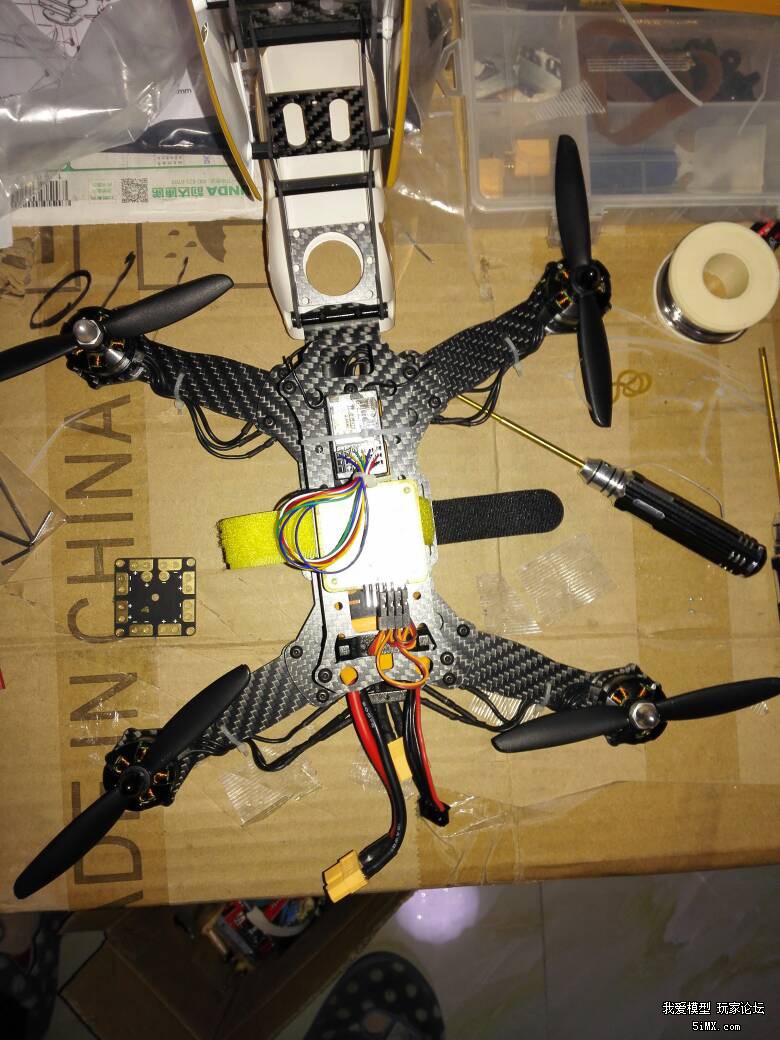
看图1234电机分别接飞控从左到右的1234针脚 |
%7WHV$Z~PL(4V2@MP2%)H7V.jpg (43.97 KB, 下载次数: 1)
H7V.jpg")
z1005890995 发表于 2015-12-17 01:09 错了,所有电机方向均反了 |
oakli 发表于 2015-12-15 15:11 电机转向是前面两个向外转 后面两个向内 机头左正牙电机 右反牙 机尾左反 右正 螺帽拧紧方向均和电机转向相反 螺旋桨安装为机头左逆时针旋转 右顺时针 机尾左顺时针 右逆时针 飞控cc3d默认设置 飞控直接用普通的3M双面贴粘住的和这有没有关系? 起飞严重抖动 无法起飞 直接乱跳 抖动方向抖动 哎白天上班 晚上下班来家搞到现在了好心烦。 到底是啥子情况么 是调试的问题还是电机转向 和浆安装的问题 |
来自苹果客户端|
机头左正牙电机 右反牙 机尾左反 右正 螺帽拧紧方向均和电机转向相反 螺旋桨安装为机头左逆时针旋转 右顺时针 机尾左顺时针 右逆时针 飞控cc3d默认设置 飞控直接用普通的3M双面贴粘住的和这有没有关系? 起飞严重抖动 无法起飞 直接乱跳 抖动方向抖动 哎白天上班 晚上下班来家搞到现在了好心烦。 到底是啥子情况么 |
来自苹果客户端
oakli 发表于 2015-12-15 15:11 准备装机,很有帮助  |
|
欢迎你入坑 |
z1005890995 发表于 2015-12-15 15:16 坛子里高人多,我也就是拾人牙慧  |
 /2
/2 
 收藏
收藏




