johnniechang 发表于 2017-9-18 20:29 bf3.2的gyro滤波还是要自己设定的,D陷波(带阻)滤波自动了。我后面会另开一贴说明,bf的界面已经够用了,虽然没K8那么好用... |
欢迎继续阅读楼主其他信息
|
我也想用在小雞上 一些功能很好用 例如加個小圖傳可以控上調pid看電壓電流 新的bf3.2也不用設定濾波了 半自穩大概可以用腳自旋翻 只是直機有些要求特殊 bf pc介面也不適合 只待慢慢完善了 |
本帖最后由 roland-c 于 2017-9-18 18:51 编辑 cm767821 发表于 2017-9-18 18:45 到时候我会新开一贴。 目前主要在考虑说明的写法...可能需要介绍一些穿越的知识,特别是PID调节的问题,新手学起来可能比较难 (网上的教学视频都有问题,说得太简单了,说是“慢晃降I,快晃减P”,大机(包括大多轴,F330以上)要考虑很多别的问题) |
|
期待中........ |
|
不错不错,加油! |
|
我觉得小直机(80-250mm)用小型的spF3可能比较划算,有正自稳(试过,切过去瞬间回正),而且滤波也很强大(远比CC3D好)。 目前我时间不太多,手头也没有碳桨的450来测试。我正在考虑放出固件和说明,有兴趣的可以继续测试下去。 Esky目前的飞行状态已经和K8相差不多了,但飞机自身虚位太大,所以手感上没参考价值。 |
zhangpengsir 发表于 2017-9-17 20:53 cleanflight/betaflight系列飞控也很稳定  手里的naze32, F3EVO包括几个有刷的,随便怎么撞飞控都没事,上电自检瞬间通过(CC3D要很久) |
roland-c 发表于 2017-9-17 20:48 CC3D我个人也不喜欢,早就放弃了! 虽然pix调起来复杂,但还是pix比较稳定~ |
本帖最后由 roland-c 于 2017-9-17 20:49 编辑 zhangpengsir 发表于 2017-9-17 19:56 不是感度过高,是算法的问题。(感度过高是快速猛烈晃动....虽然看起来也是抽风) 曾经有个CC3D mini飞四轴(F330, 天行者20A,郎宇A2208,ATG8寸桨),上电起飞经常瞬间侧翻。撞击后摆正,不重新上电,直接起飞也很容易侧翻。 (如果起飞瞬间没有侧翻的话飞行很正常)后来换PIX后再也没有发生类似的问题。 |
roland-c 发表于 2017-9-13 16:56 抽风就是PID不适用,感度过高的表现,不是飞控的问题! |
|
期待。。。。。。 |
|
更新:Bug已经排掉,即将放出固件和说明。 |
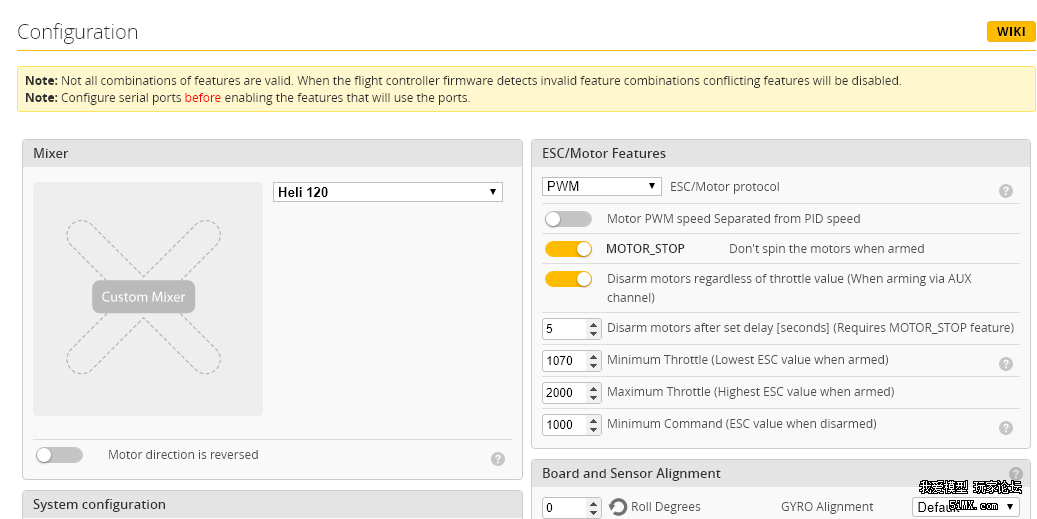
cm767821 发表于 2017-9-15 13:25 src\servos.c 和mixer.c 里面各增加一个混控即可。需要改动的地方:增加混控本身;增加飞控驱动主桨的部分(mixer.c里面写一个singleprop选项);然后给"Heli 120"选项加入舵机驱动的清单。 大多数改动的部分已经发布在首贴中我的github页面上了。 |
|
真的很厲害,可以用f3飛控玩直機. 請問樓主要(如何)寫入那些代碼,讓直機可以飛.... |
johnniechang 发表于 2017-9-13 17:50 连续自旋会慢慢往一个不确定的方向歪,可能跟直机自身的严重虚位也有关系。horizon(半自稳)我觉得没必要试,可以视作angle(自稳)+满舵翻滚。 angle(自稳)下连续自旋没问题,不会歪。 |
roland-c 发表于 2017-9-13 14:17 連續自旋會變成怎樣?? 用horizon模式呢? |
-爱好者- 发表于 2017-9-13 16:59 有,但是是空的(选下去不能保存)。 所以我改了几行代码,增加了CCPM混控之后可以飞了。 |
|
SF3还可以这样玩,学习学习一下。 SF3自身有直升机选项没有。 |
本帖最后由 roland-c 于 2017-9-13 16:57 编辑 zhangpengsir 发表于 2017-9-12 06:43 据说刷iNAV固件可以 spF3飞控,带气压计也就80块钱...比K8便宜 我只是想寻找一个可靠的替代K8用于新手的陀螺仪,因此只是拿一个很旧的飞机测试一下。 目前的状态:正飞高速航线+折返没问题(侧风3级),正自稳也没问题,飞控很稳定(不会像CC3D那样PID抽风)。 对于新手练习悬停的话我觉得应该可以了。 但Esky450的虚位很大,旋翼头相位也没对准,所以没法测试准确的手感...以后可能要用精度正常的机继续测试和细调。 |
 /1
/1 
 收藏
收藏