| 同上,摇臂那里看起来怪怪的 |
sonny 发表于 2023-2-21 14:44 不是抵消,是整体偏了个角度 |
|
本帖最后由 sonny 于 2023-2-21 16:50 编辑 我的理解是:相位滞后是90度没错,三桨的话旋进的会提前进入最大值,但是另外一支旋出的也会提前进入最低值,前后抵消。 |
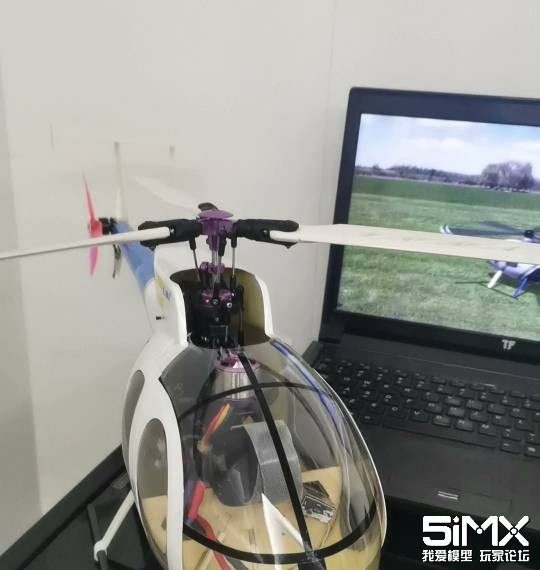
| 一般桨夹摇臂和十字盘的相位差是90°,这个看起来不是90?这样会导致陀螺仪想要的修正方向和实际动的方向有偏差,所以飞不稳 |
|
这三浆机怎么会是有付翼的呢? 明明白白的无付翼机,付翼机还有四浆和五浆的呢。 外观看你这机机好像是尾无刷 你说你这机上本来就带有kbar,这个就是无付翼三轴陀螺。你换六轴自稳陀螺也许还水土不服呢 你说的"打杆就飘”,不明白是什么意思,能说的清楚点吗? 尾浆用电机的,那电子设备里就一定需要有混控器的功能,你这成品机上有无说明可以调节混控感度的机关?要是有不妨试试 |
| 无副翼,需要三轴陀螺仪辅助,主旋翼感度不能设最低。 |
 /1
/1 
 收藏
收藏




