| 略高深 |
| 这研究有点太专业了~ |
 高人字字字字字 高人字字字字字 |
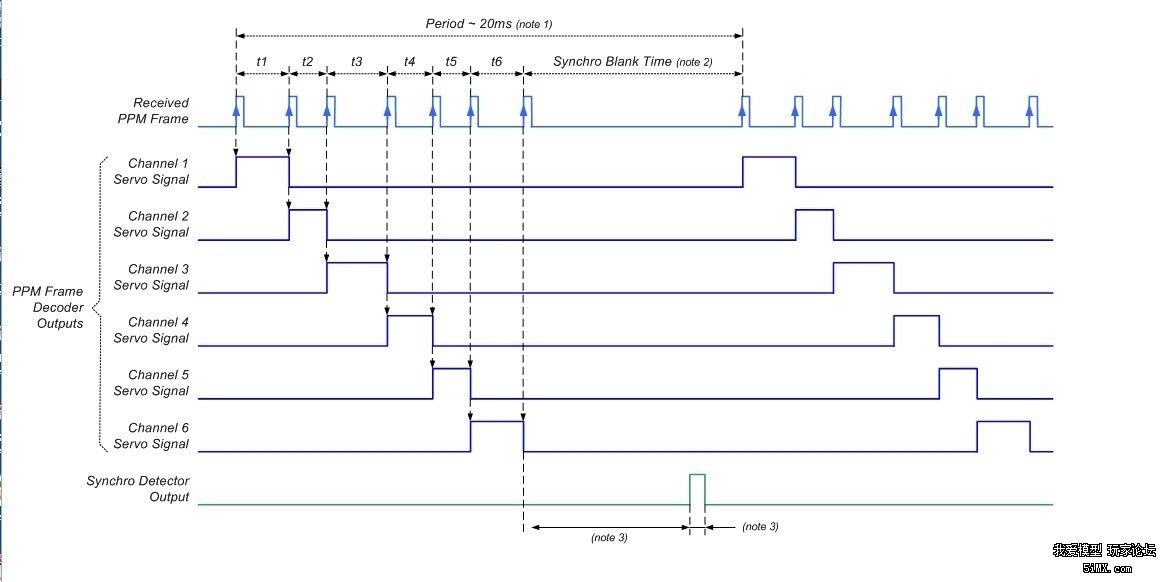
| 打个比方,有十个通道,当第一个通道的舵机开始动作时,第十个通道可能还要【等待】2x10=20毫秒才能看到给自己的信号。 |
老金 发表于 2012-11-7 08:43 在网络了解了点舵机的原理,我的见解是是舵机工作时检测只是它的高电平时间,与其他的参数没关系的,最重要的是周期和脉宽宽度, 延时--不见得吧?输出的方式只是软件配置输出的一种格式和发射机PPM的一种规范,但解码又不一样有点不解。 |
本帖最后由 guodongbubin 于 2012-11-9 21:47 编辑 铜河 发表于 2012-11-9 19:27  , 从AVR,ARM都是IAR,习惯了。你写的输出是标准的解码吗?我后面还是写成Futaba 一样的输出格式规范。JR的2.4是不是我测得同相位那格式?普通的频点JR有差别吗 , 从AVR,ARM都是IAR,习惯了。你写的输出是标准的解码吗?我后面还是写成Futaba 一样的输出格式规范。JR的2.4是不是我测得同相位那格式?普通的频点JR有差别吗 |
| 偶也用SOP_20的103F2,感觉挺好的,不过我用的是官方编译器,不是IAR |
|
问题解决了,但原因有点无语,之前接受的数据用全局RX_Buffer[CHANNEL_MAX]数组来暂存,输出也是此数组的后出现抖动,但后来变量分开赋值就没问题了,差测可能是IAR STM8的变量分配有影响。。 刚入门STM8不久,经常碰到一些摸不透的问题,不过良好的软件编程习惯是必须注意的。 |
本帖最后由 guodongbubin 于 2012-11-9 15:50 编辑 铜河 发表于 2012-11-9 14:11 你好,请问你舵机输出端是用的硬件PWM还是软件模拟的方法,上面我是用模拟比较来做的,但输出会出现异常,之前直接使用硬件输出时没问题的可以。 现在手上用的是SOP_20的103F2,可以输出六个通道数据,能方便交流下吗? |
|
偶在用STM8S,也用它做接收机,输出正常。 普通2.4G的遥控器,多数采用的是数据包传输方式,传输过程中用的就是PCM编码信号。 |
本帖最后由 guodongbubin 于 2012-11-9 13:59 编辑 zjzc 发表于 2012-11-8 09:49 呵, 据说也是需要认证的。我现在手头上设备欠缺,不好做相应的验证,按行规因该是输出PPM通道解码标准的信号规则的。。 |
| 据说pcm跟2.4g差不多 |
zjzc 发表于 2012-11-7 09:53 请问那普通频点的接收机输出难道也和2.4Ghz一样 ?  |
| 双叶是传统的fhss(自动跳频)系统,每个通道占用一段带宽,所以直接发射ppm信号没问题(这也是为什么双叶号称最快)。XG6用了串行信号通信(自称DMSS)以减少带宽占用,因此必须要编码输出。 |
|
传统的信号通道之间有延时,理论上会导致舵机动作不一致。 JR和spektrum的2.4g系统将各通道同步后再输出。 |
| 虚心学习。 |
 /1
/1 
 收藏
收藏
