打开手机扫一扫
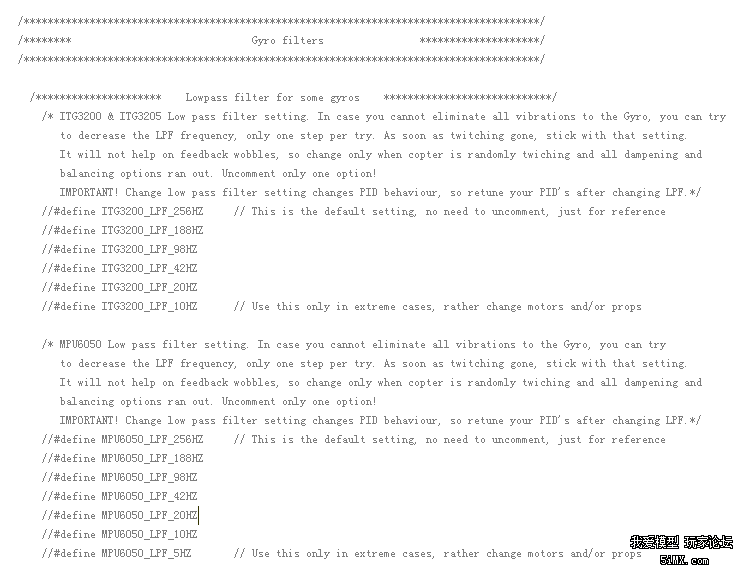
昨天装好的四轴,飞起来抖的厉害,油门忽高忽低。 10DOF 九轴模块 L3G4200 ADXL345 HMC5883L BMP085 陀螺仪 L3G4200的低通滤波怎么设置? 源码里没这个陀螺仪的滤波。
欢迎继续阅读楼主其他信息
查看 »
 /1
/1 
 收藏
收藏