|
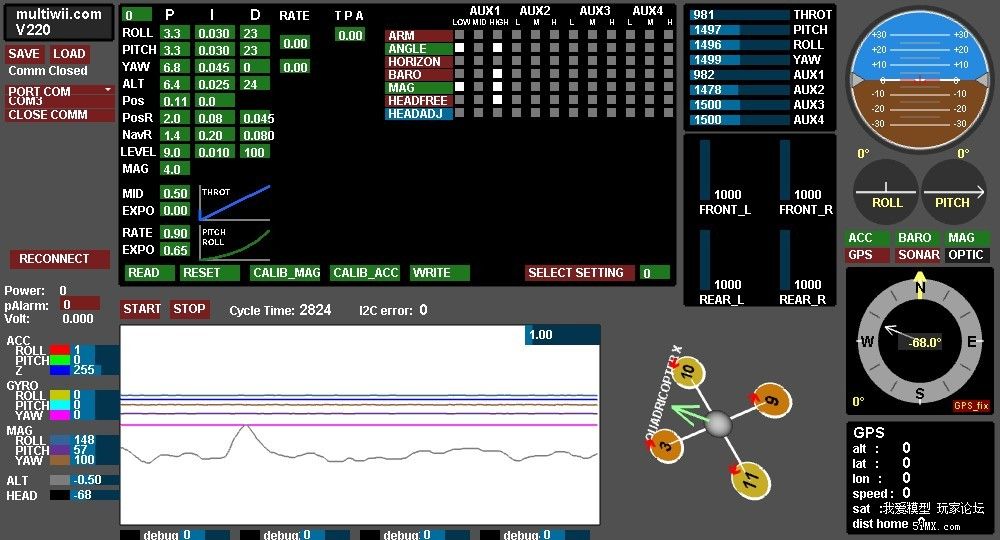
本帖最后由 小插曲 于 2014-4-21 16:45 编辑 LZ,您好!我想问一下程序中传感器的方向是怎么设置的,比如MPU6050: #define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = -X; accADC[PITCH] = -Y; accADC[YAW] = Z;} #define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = Y; gyroADC[PITCH] = -X; gyroADC[YAW] = -Z;} 用什么方法来判断X,Y,Z以及正负之类的,在上位机上调试陀螺仪和加速度计数据波动很大,是上面的X,Y,Z设置错误的吗?麻烦楼主有时间的话帮忙解答一下,谢谢!谢谢! |
|
谢谢LZ,已经解决 |
小插曲 发表于 2014-4-14 16:12 你是说给飞控供电吗?如果你的电调有BEC的话可以直接供电,没有的话可以单独买一个,这个是5V供电,如果你用的和我一样是开发板的话,你可以直接接电源,这个开发板可以直接6-12V直流供电 |
|
请教LZ一下,变压那个装置叫什么?我的11.1V的电池,一直愁怎么把电压减小呢!哎。。。电子电路太烂了,谢谢! |
xzzd1000 发表于 2014-4-12 19:22 没有 |
|
有没有试过用蓝牙控制四旋翼? |
aweixinga 发表于 2014-4-2 15:43 已解决,感谢。http://bbs.5imx.com/bbs/forum.ph ... &extra=page%3D1 |
polosun9999 发表于 2014-4-2 13:10 定高打开没有?默认参数可以起飞吗? |
|
PID默认基础上已进行微调,但不知为什么最大油门仍无法起飞,只是在地上颤动和慢慢旋转。桨正反没错,马达转向也没错,接线也没问题,飞控为MWC lite。请各位帮忙,多谢多谢。 机架:F450 电机:XXD kv1000 电调:天行者20A 桨:1045反正桨 图片1.jpg (100.41 KB, 下载次数: 0) PID |
图片1.jpg (100.41 KB, 下载次数: 15)

xzzd1000 发表于 2014-3-22 13:30 教程很多的,仔细找找喽 |
|
挺困惑,到底怎么diy,教程很少 |
|
顶 |
|
顶一个,折腾万岁 |
|
顶 |
|
你测试了定高吗?我的用默认参数,上下3,4米起伏。改成2.1的默认PID就是0.1m的误差了。 |
yaybig 发表于 2013-7-17 07:53 论坛里教程多的是,找找就知道了 |
aweixinga 发表于 2013-7-17 00:17 非常感谢。你是自己看源代码改 的,还是网上查资料的? |
 /1
/1 
 收藏
收藏


