|
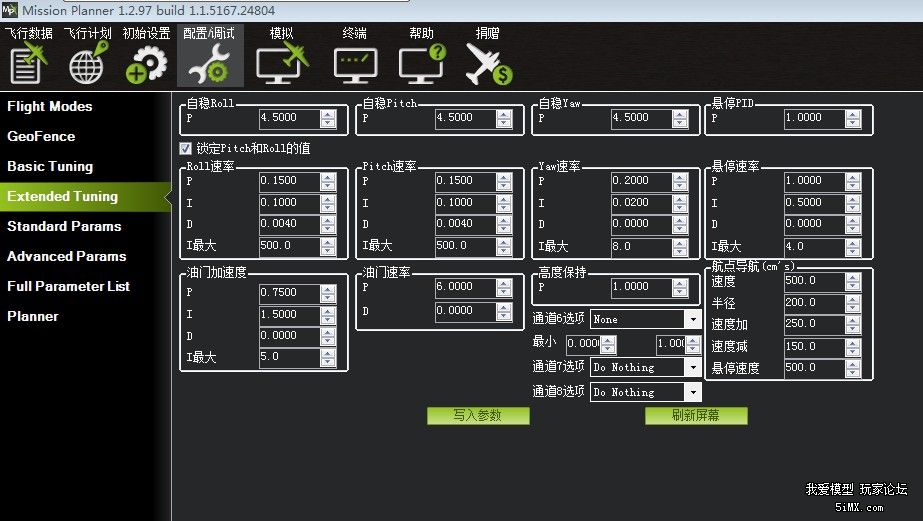
本帖最后由 jujumao 于 2014-5-17 09:22 编辑 不要神化PID,好好去理解PID的原理再来设置吧,如果默认参数能满足要求的话就不要调了。 PID在不同的环境(机架,重量,配置,震动,机器重心等等)会不一样,根本就不能照搬别人的PID设置,要自己慢慢调的。 你空载调好的PID跟再挂上其它装备后的PID肯定会不一样。你装上装备后的剧烈抖动按我的理解是觉得是D加太大了(机器KUAI SU剧烈抖动?),D你用回默认的值(0.0040)试试,其它的PI值可以暂时不改。如果改后抖动频率减慢的话就再减下P。(不要飞太高哦,炸机了我可不负责,呵呵) APM默认的PID是一个很保守的参数,其实是为兼容尽量多数的配置能飞行而不会有太大的抖动,自动学习PID后的P会比原来的大一点很正常,P越大,修正就越快,机机越能保持稳定状态,但也不能太大会自激。 自动学习PID是为了更好的迎合各个机器的配置环境,使飞行更加稳定。 |
|
应该挂上相机后再做一遍自动调参。重量不同是影响pid参数的。 |
sunwon 发表于 2014-5-15 16:13 记得以前的版本下降快了会晃,刷3.13后没有这个现象,你可以刷最新版本试试。 |
hsp2008 发表于 2014-5-15 23:41 三轴云台750G |
|
和我基本一样的配置,我的没加云台,6S5000电,重量3000G,云台有500G? |
周末影像 发表于 2014-5-15 18:30 哈哈,是你自己大意了 自动之后,数值反而高,说明你的JJPID应该往高了调, 比如P 从0.1500增大到0.2500,你取个中间值0.200,挂机机一试不就知道了,一点调,多调多飞, 调P--试飞--调P--试飞-- 来来回顺几十次很正常,总能找到合适你JJ 数值,就是麻烦了点, |
zwdxbb 发表于 2014-5-15 16:27 泡泡老师,回复完你的跟帖,我出去挂相机试飞,结果很悲催,看我帖子的更新。 |
|
路过 |
|
顶 |
|
机器 越重, P D 越大, 电压越高 P D 越小。 相对的。 |
sunwon 发表于 2014-5-15 16:13 这个还没有试,我等会要出去试拍,回来告诉你 |
本帖最后由 周末影像 于 2014-5-15 16:37 编辑 zwdxbb 发表于 2014-5-15 16:27 是的,原理我就不清楚了,是不是和机器重量有关?是不是小机器往小了调,大机器往大了调呢? |
|
看到大部份自动后,下面的P、 I都是往小了调,你的却往大了调,还大那么多? |
|
你用新参数 定高模式 全收油门下落 会晃的厉害吗? 我总是 下落晃的厉害, 在调出来的基础上再加大了 P 和 D 就好多了。 |
 /1
/1 
 收藏
收藏