|
用的海绵不对,换一种大孔一点的海绵!!!!!!不用海绵是万万不可以的! |
|
飞控没问题,gps没问题,遥控失控了,有正确答案就是大家看不懂。。。。。。 log文件你看一下高度曲线就很明显了,我敢说高度曲线正常 |
|
另外当时我的控和飞机只3米远信号应该不会有问题倒是上面有位仁兄说的接收和飞控连线接触不良引起的。因为我是用单根杜邦线接的比较忪,回头我加固一下 |
|
没遇过 期待解决方案 |
|
综合大家的指导结合我这次飞行的情况我认为是radio failsafe设置错误引起的,因为飞行前我曾经设置过失控保护当时一直设设置成功搞来搞去搞乱了。说明一下我是用天8的控6通道的ppm接收所以不能在控里设置失控参数。只能设成失控后接收机输出一个固定pwm,可能是这个值给设错了。 |
|
这种情况我也有过 和你的一样 好像是干扰导致失控 |
|
这是你接收到飞控的(油门)线接触不好。开始时解锁就转,后来电机的震动使油门线和飞控又通啦!!然后,悲剧出现…… |
|
开源的 不是很清楚 我的NAZA 没想出现过这样的问题 |
|
小作坊生产出的飞控看来还是不靠谱的~ |
superzhengyi 发表于 2014-6-13 12:04 呵呵。自己看懂了再说。 1. 不是传感器错误导致的升高,是APM根据Failsafe逻辑做的完全正确动作。 2. 和Baro以及海绵没有任何关系。 3. 我说的可能是Radio failsafe设置不对,因为我认为TX没有这么容易丢失信号的。 请不要误导别人。 |
superzhengyi 发表于 2014-6-13 12:04 他这个八成是遥控器失控导致的 |
|
上传日志文件吧,单这个图上的信息量还是太少。 |
|
还有数据里面确实有FAIL SAFE 就是REDIO 失控,请在上电60秒后起飞飞机。还有检查线路。 |
|
解决问题后为了方便大家以后遇到类似问题有解决方案,请单独发帖,说明解决过程,以方便其他模友。多付出,多交流,成就好的模友文化,成其大焉。 |
|
楼上解释都不全面或不对。 首先你要理解APM的基本概念:定高基于自稳参数,定点基于定高参数。 突然蹿高的问题不是由GPS POSITION 控制的。是由飞控里面的高度压力传感器控制的。 解决这样的突然电机无力或者突然蹿高的问题很简单,遵循以下两点: 1.把定高Z轴方向P值减少20%。 另外,楼上所说的RTL设置和GPS搜星少 2.(重要)拆开APM飞控的外壳,用那种多孔海绵剪一个10mm*10mm*10mm的小块,垫在飞控那个有两个孔的气压传感器芯片上面。那么气压传感器就不会因为飞机的紊流造成的气压传感器错误读数造成的失控了。完美解决问题。 另外楼上所说的GPS搜星少,RTL设置不对和硬件问题都不会导致突然蹿高。 |
|
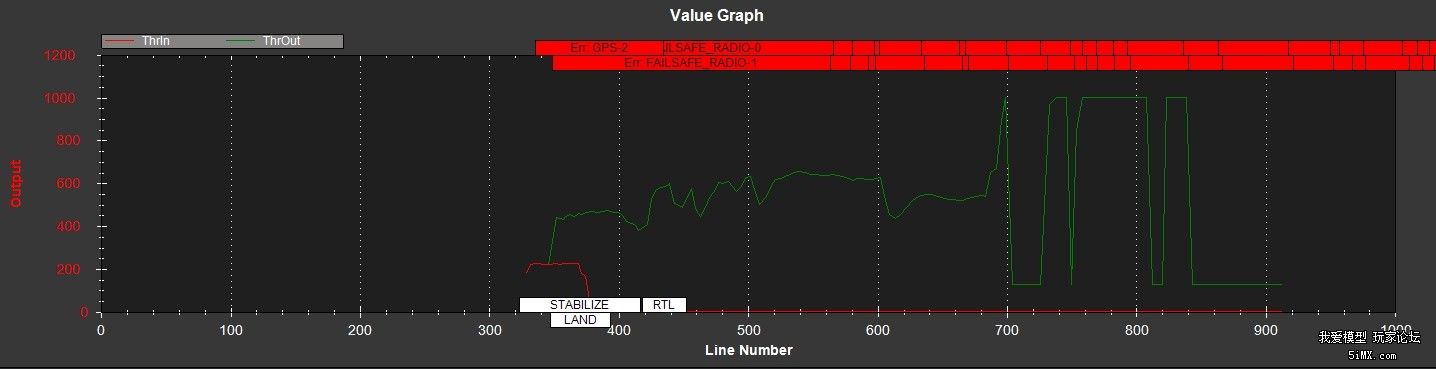
你这是FAILSAFE_RADIO, 要么是接收机失控了,要么就是你设置错误了。 具体情况就是你解锁了,然后飞控检测到了接收机失控,然后检测当前GPS座标,发现不在HOME点(正常,因为GPS刚定点,还不够精确,超过2M了),于是启动RTL,先上升到RTL_ALT, 然后Fly to home, 最后la n ding。不过撞死了。节哀,自己看看radio failsafe设置, 确保你正确理解了,不然你还要炸的。 |
| 参与人数 1 | 威望 +1 | 收起 理由 |
|---|---|---|
|
| + 1 | 正解 |
|
你这是各种失控啊 为啥输入会是0呢 |
|
发logs文件吧............... |
 /2
/2 
 收藏
收藏


