本帖最后由 alden 于 2017-2-7 15:52 编辑
之前用APM 2.6 调试传统直升机的应用,被TBE困扰,反复调试修改,也未能解决,暂且搁置!
http://bbs.5imx.com/bbs/forum.ph ... &tid=1035000&extra=
更换下一代32位Pixhawk飞控来测试它的传统直升机应用!
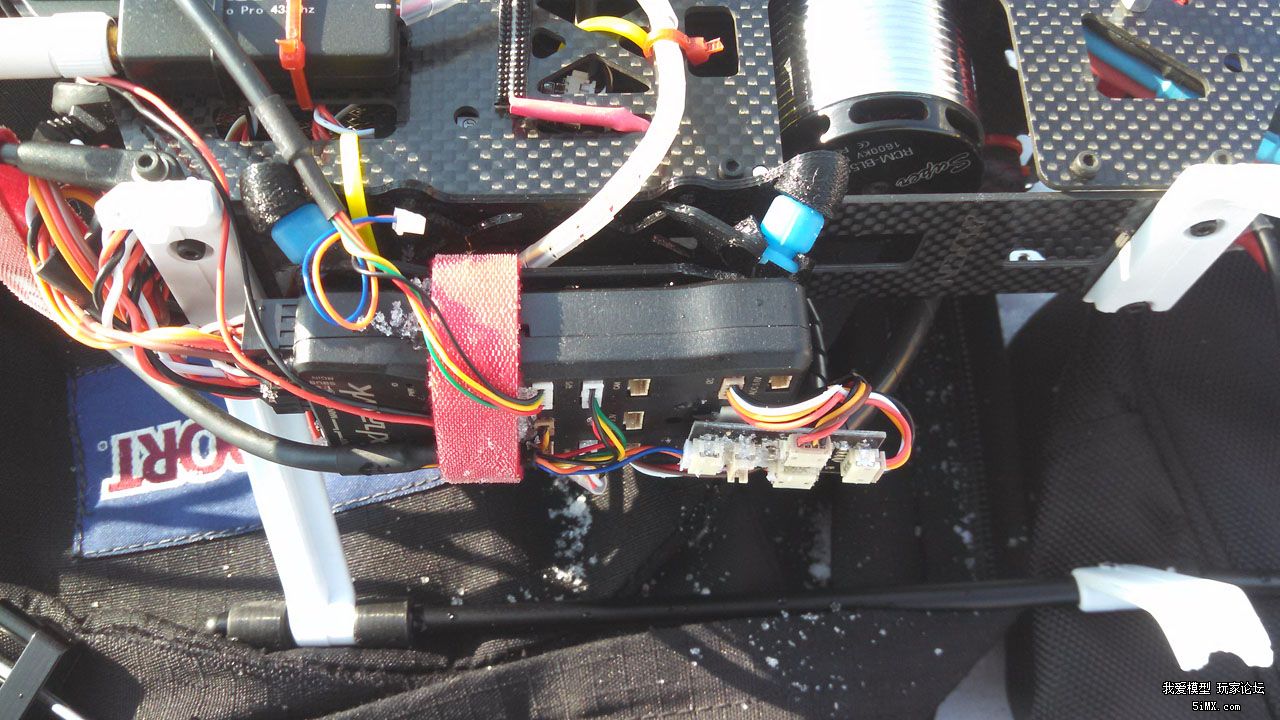
反人类的插口和接线设计:
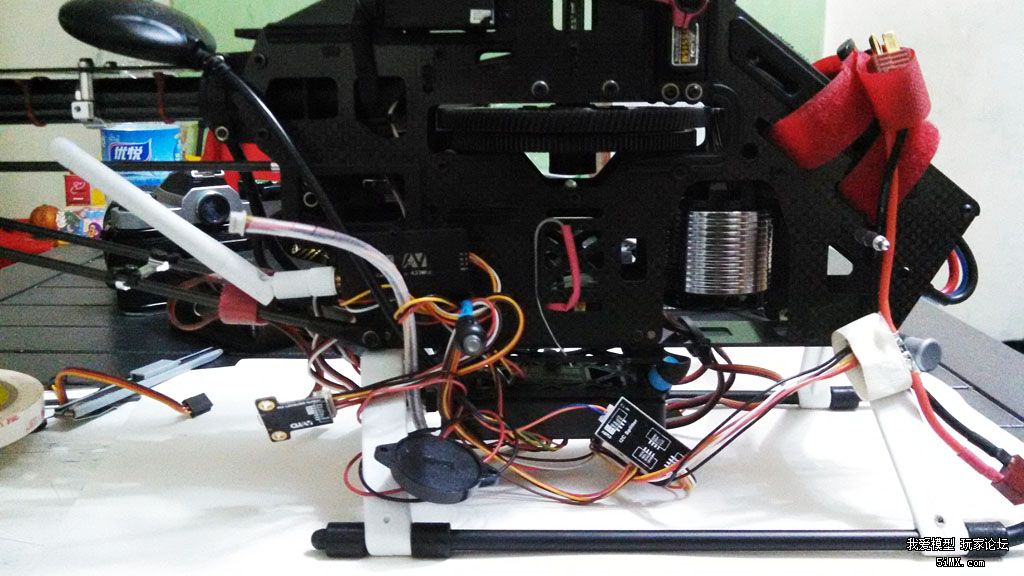
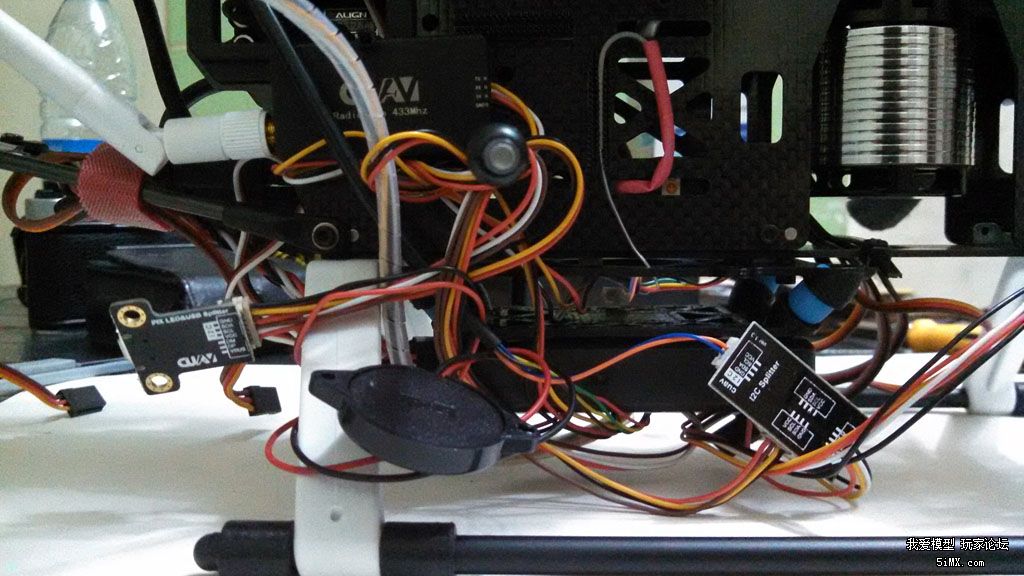
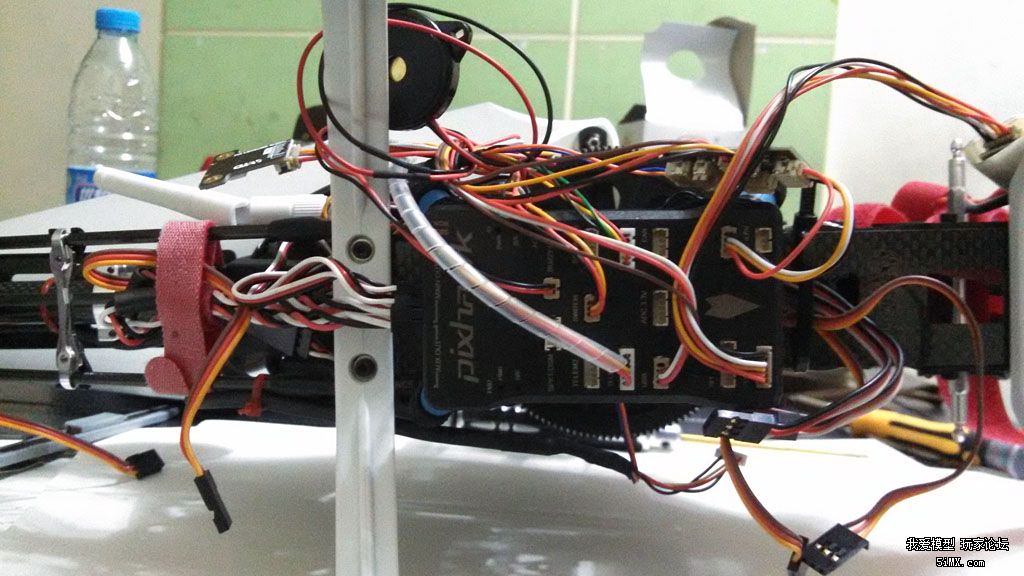
使劲整理,只能到这样:
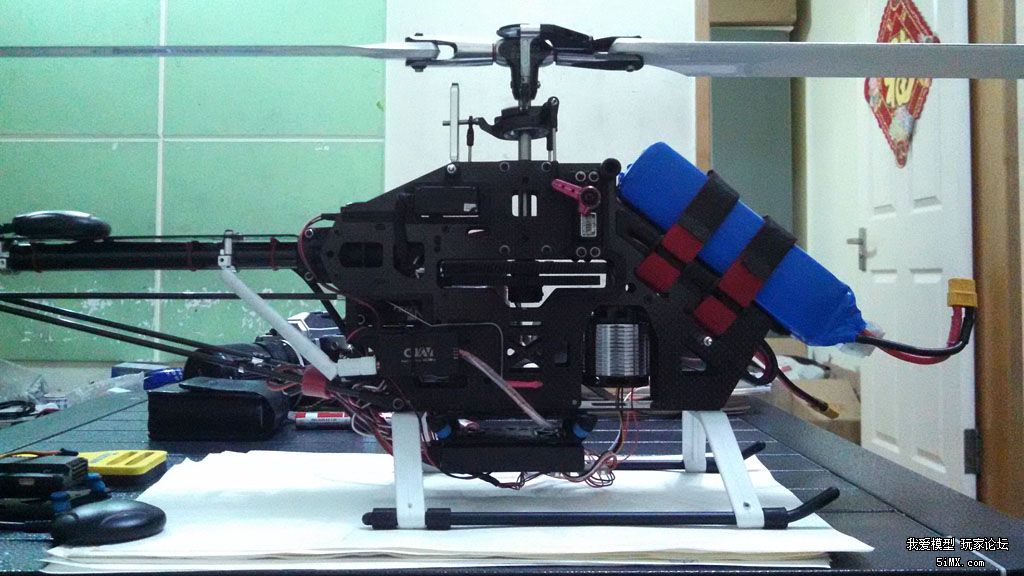
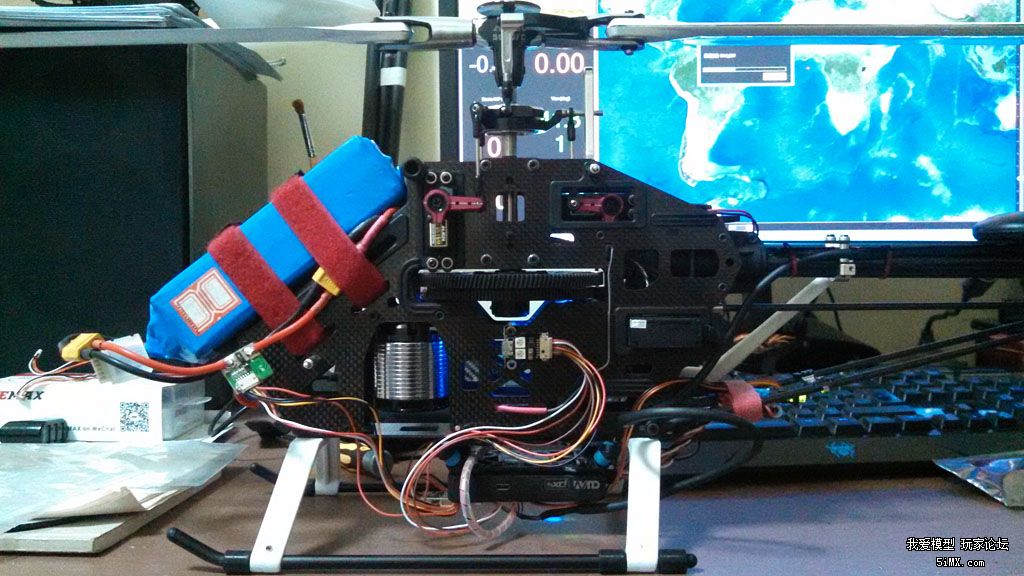
不影响戴帽子:


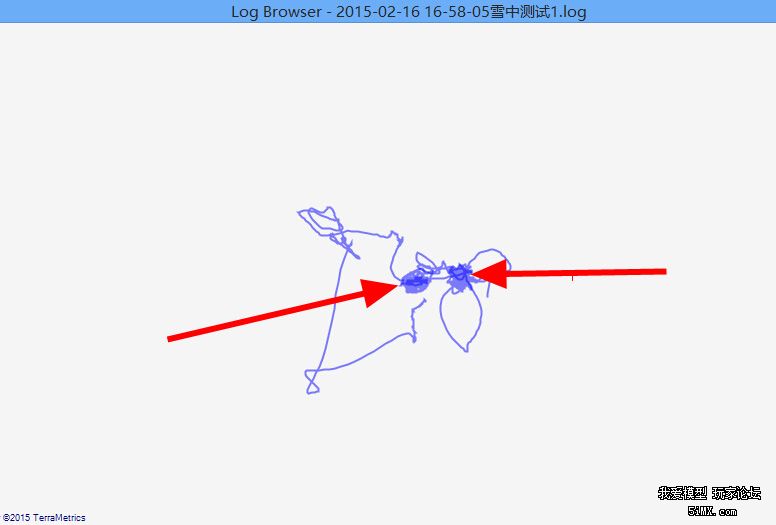
首测定点成功:
2015年2月16日,雨夹雪转小雪,北风3-4级,测试Pixhawk 搭配双GPS(主GPS Neo 6M、从GPS Neo M8N),冒雪测试亚拓 500 DFC 定点悬停(Loiter):
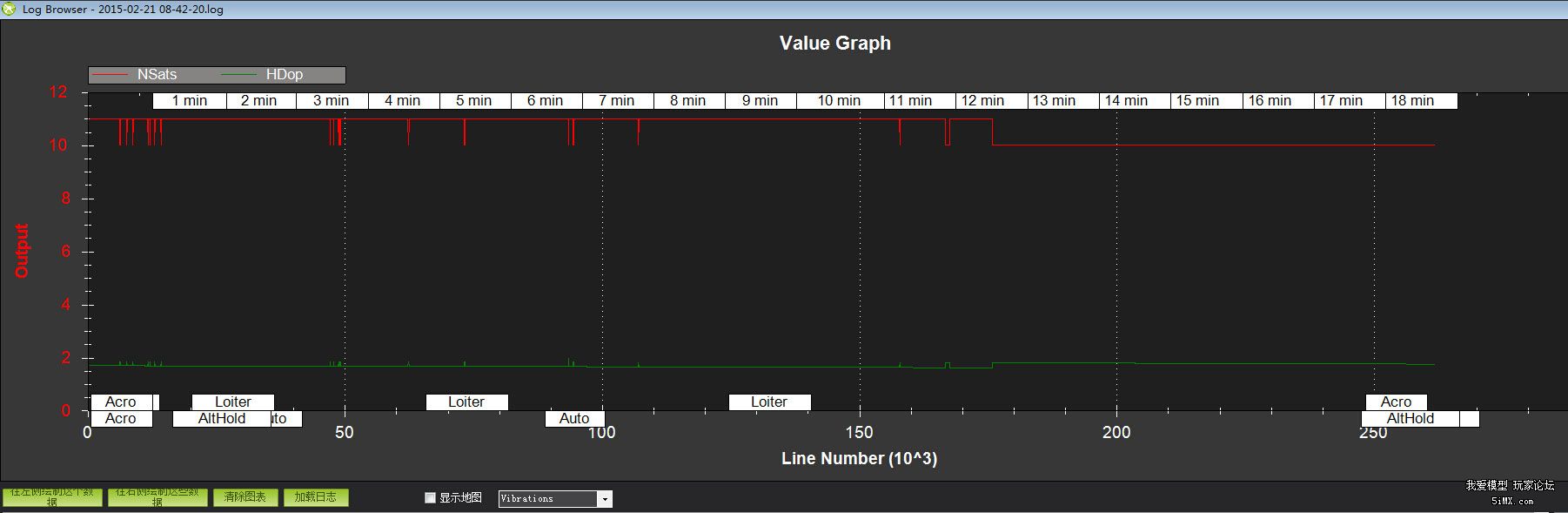
天气原因,主GPS卫星数量始终在7-9颗,看不到从GPS的卫星数量,HDOP值,在2.1-2.4之间~

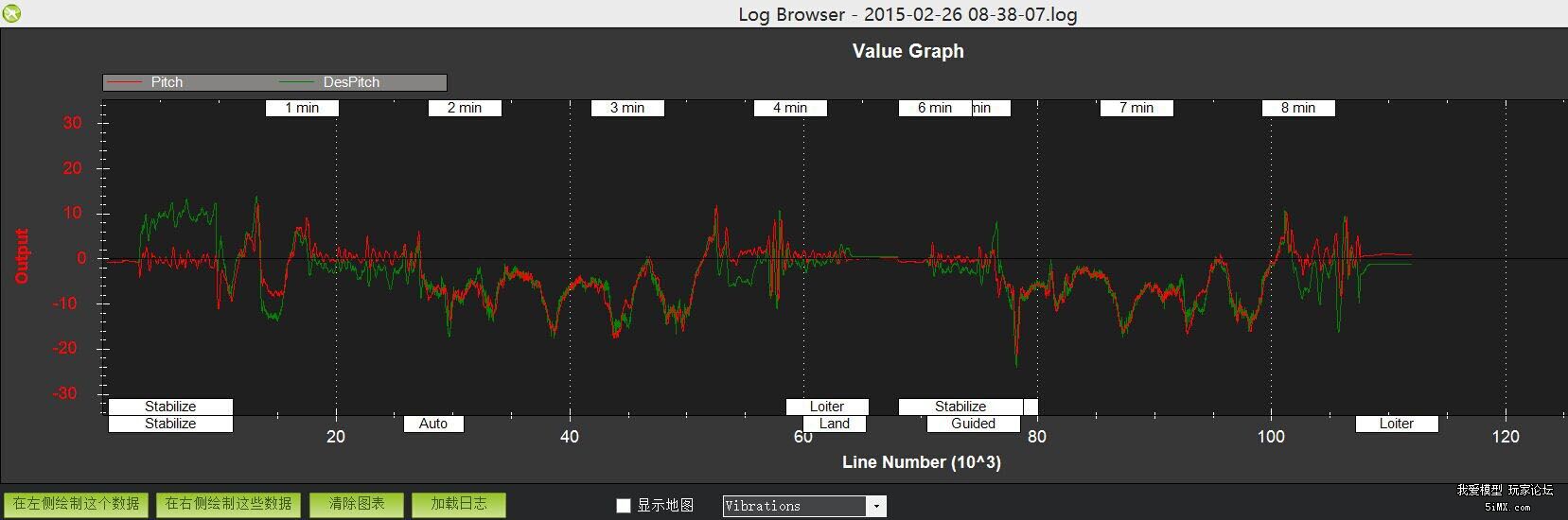
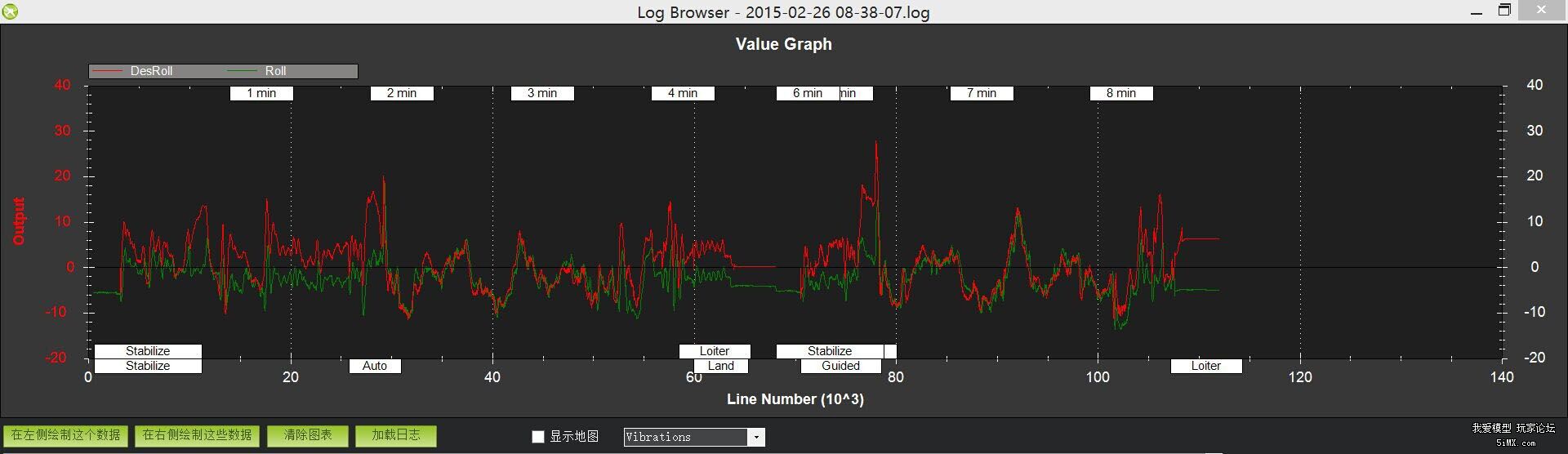
迎风时,仰俯角度会有一些震荡,转为侧风,震荡消失;侧风时,稍有摆尾,下次可以尝试提高一些Yaw感度!
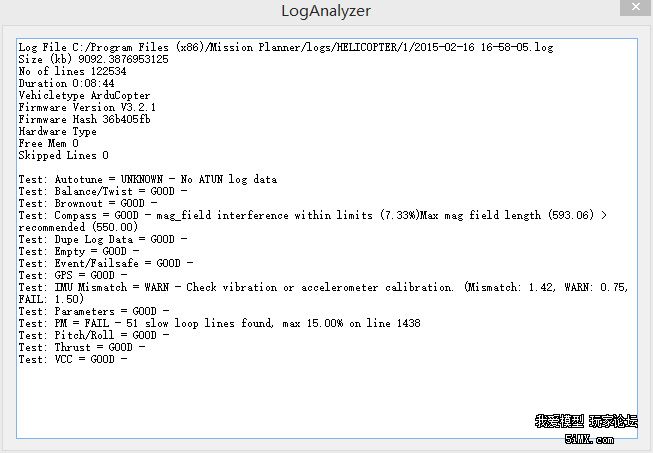
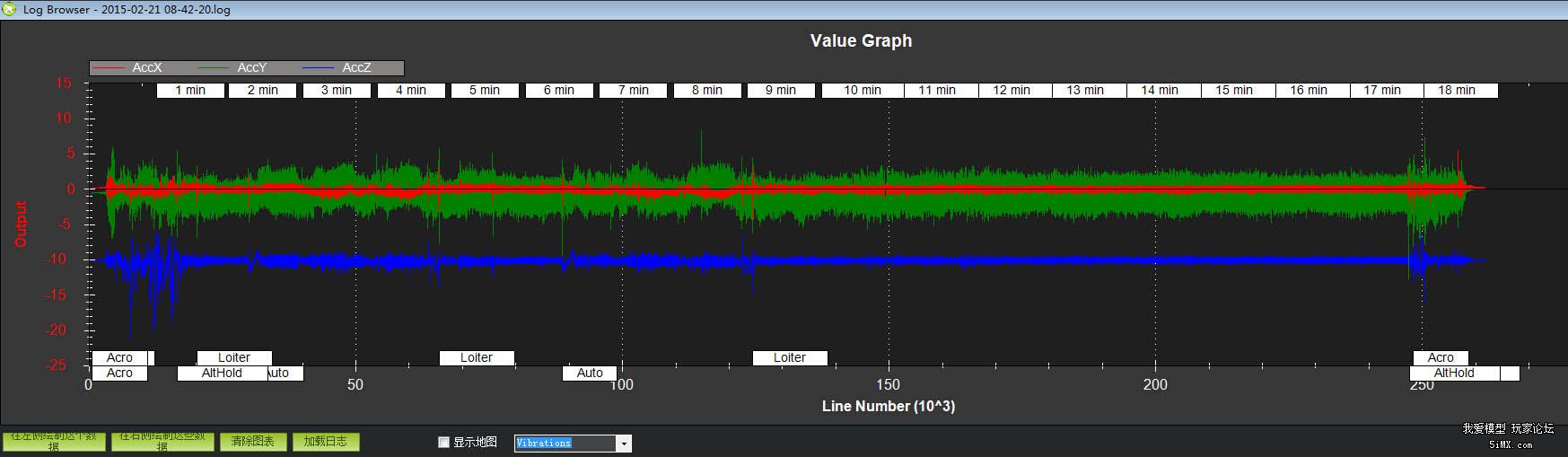
日志分析显示,各功能工作正常,包括罗盘,只有震动值,提示应该再尽量减小……
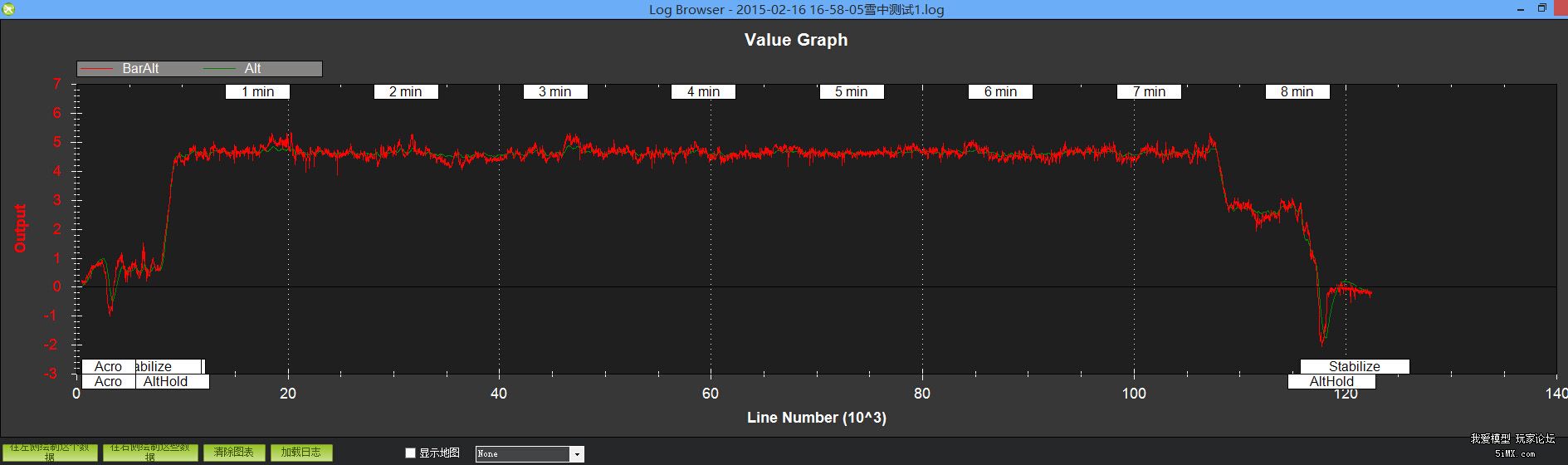
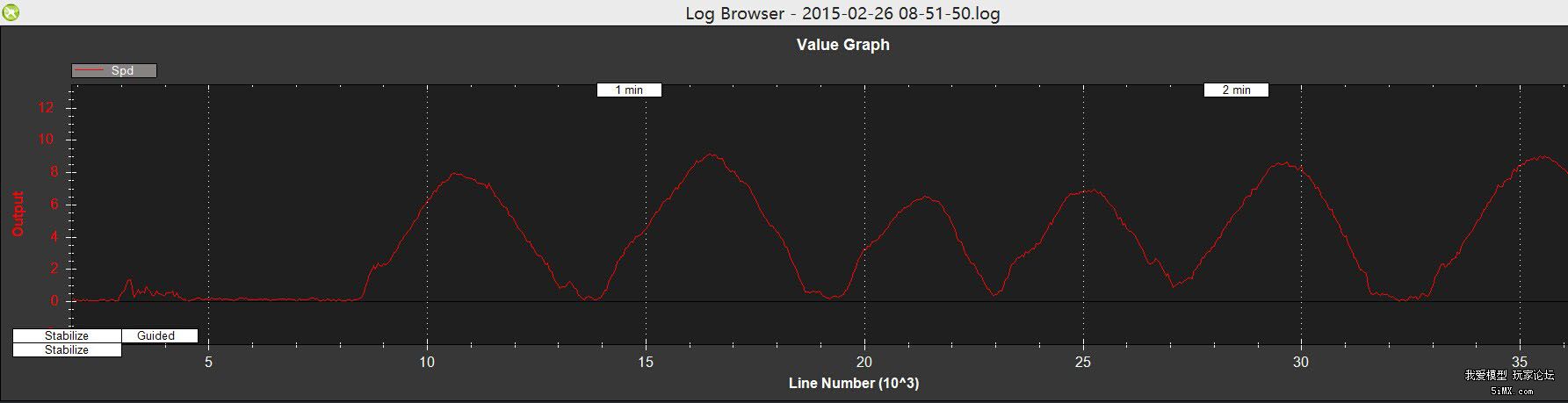
定高表现不错,在迎着风的水面边缘低空悬停,定高表现稳定。直升机的定高修正也体现出了他的优势-利用改变总距来控制定高,抗风性优势明显!
视频在此:
——————————————————————————————————————————————————————————————————————————————————————————
2015年2月20日,大年初二,更新:
这次开启了“卡尔曼过滤”,双GPS,HDOP控制在1.4左右,精调的主旋翼的PID。在经过几轮长时间定点悬停测试后,今天首次尝试自动航点任务,测试成功。鉴于冰面较硬,今天没敢尝试自动起飞和自动降落…………
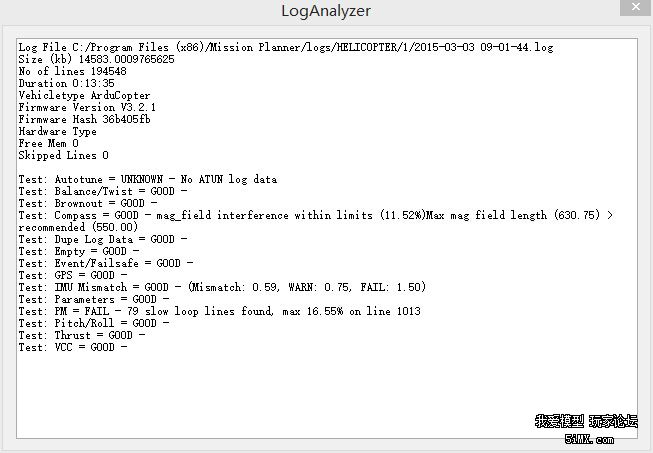
测试之后的日志分析:
震动,经过机械调试和“卡尔曼过滤”的计算,已经很理想了~
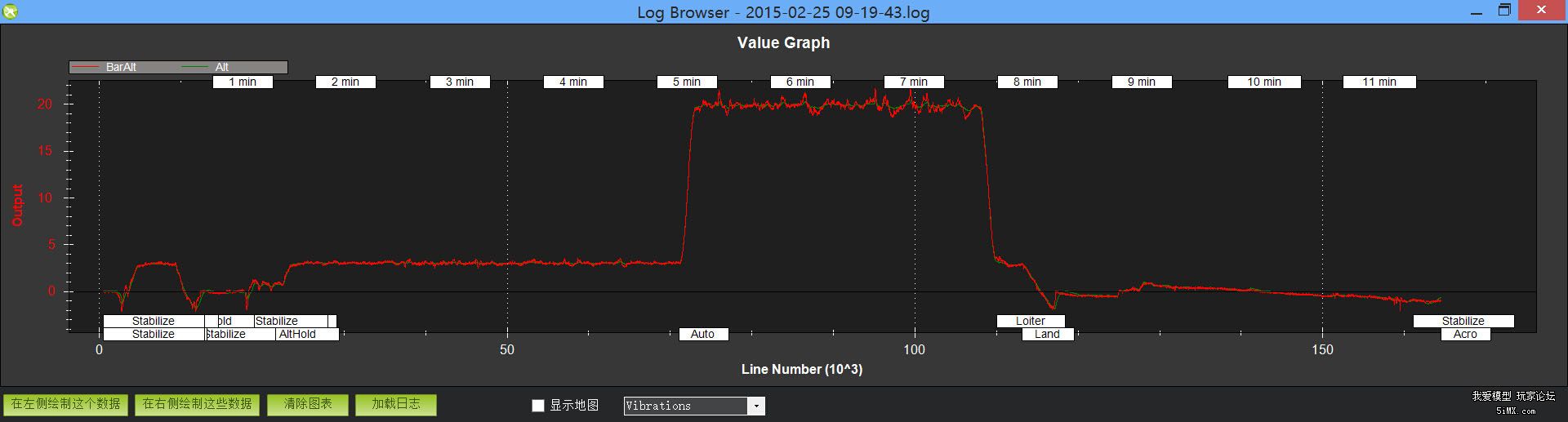
定高,可以用完美来形容,绝不亚于DJI~
天气原因,卫星数量不是很高,但HDOP足够~
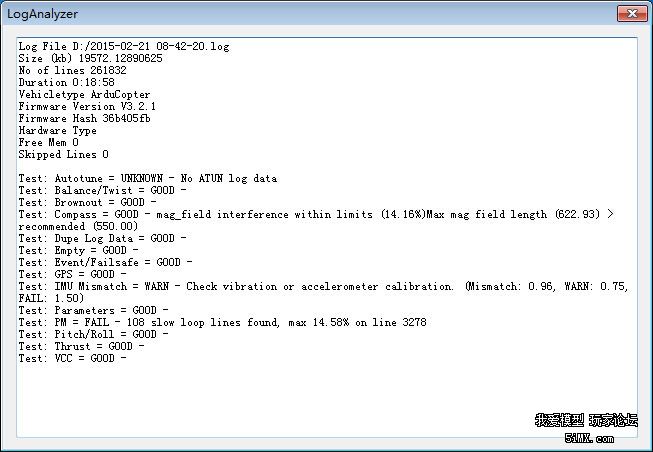
最终的分析结果,各方面基本满意,IMU震动提示注意,应该也是综合了起降和个别机动的数据而提示要注意~

——————————————————————————————————————————————————————————————————————————————
2015年2月21日大年初三更新:
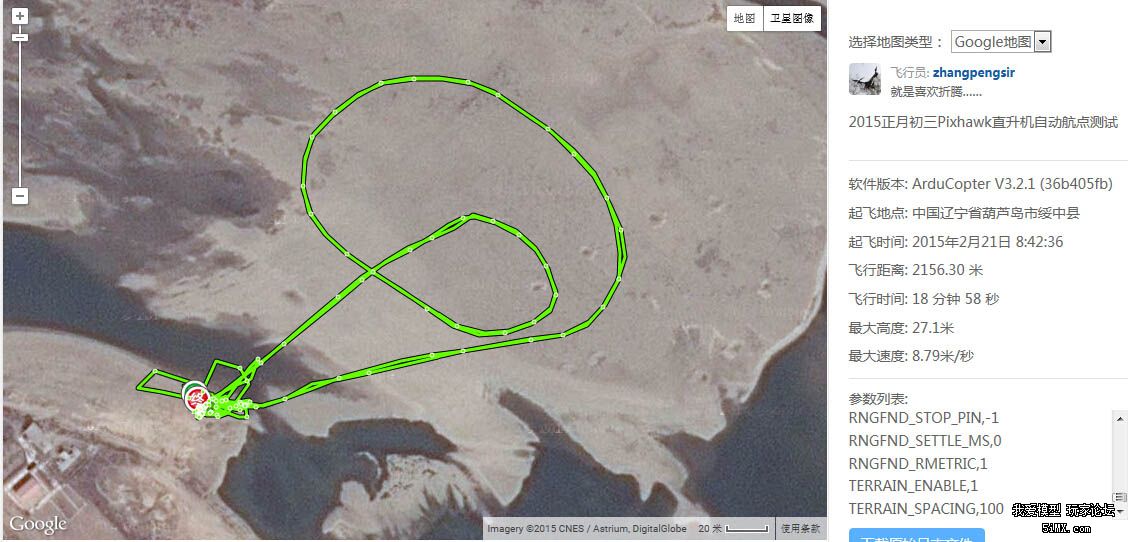
远距离大曲线航点自动任务测试成功!
bing卫星地图下的飞行轨迹~

谷歌地图下~
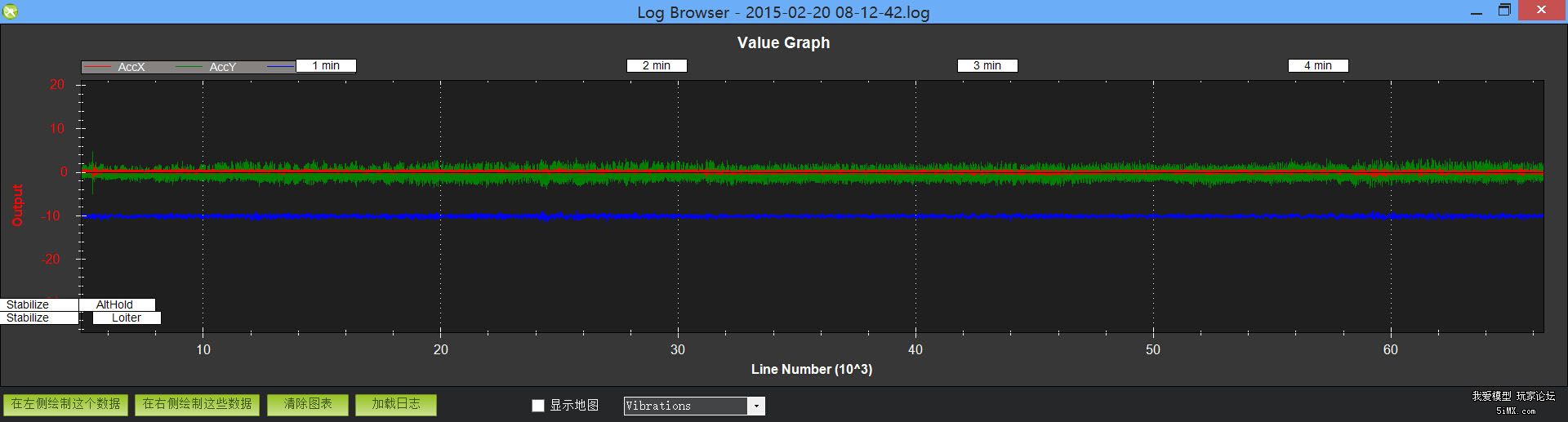
整个飞行的震动情况~
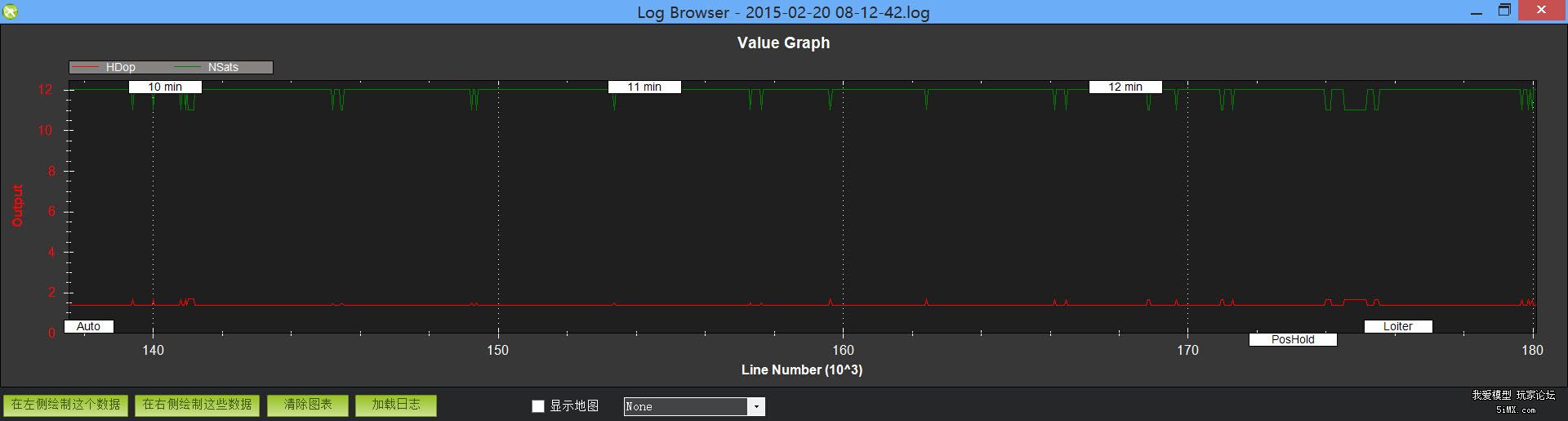
GPS与HDOP状况~
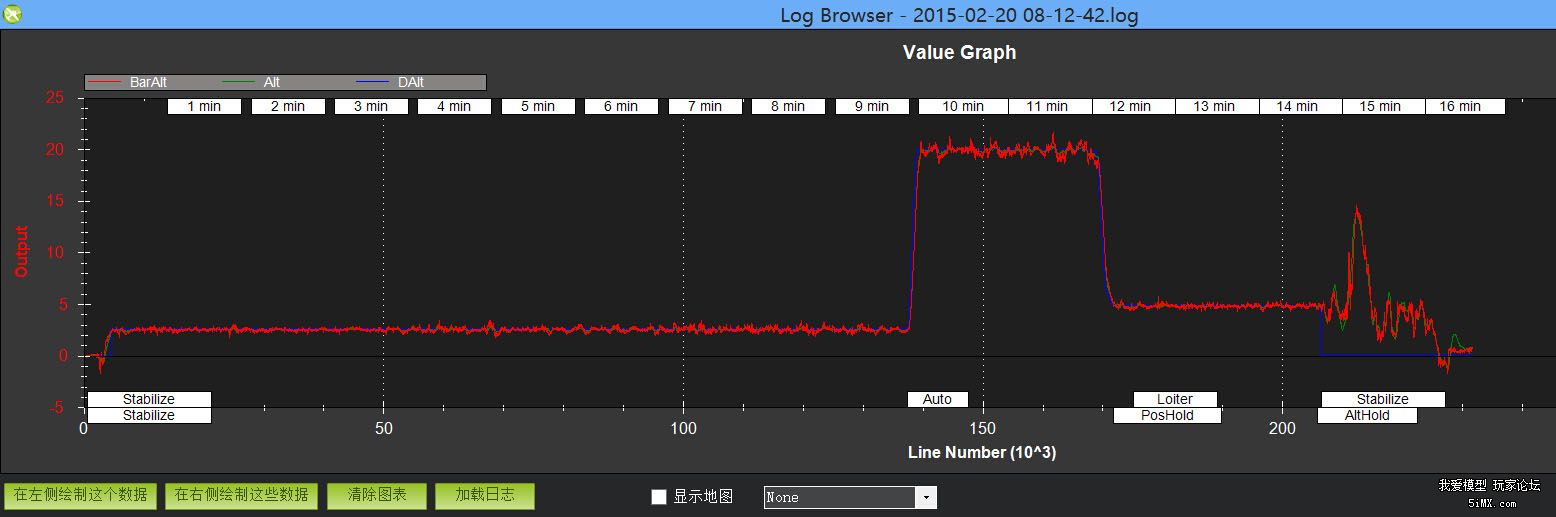
定高表现情况~

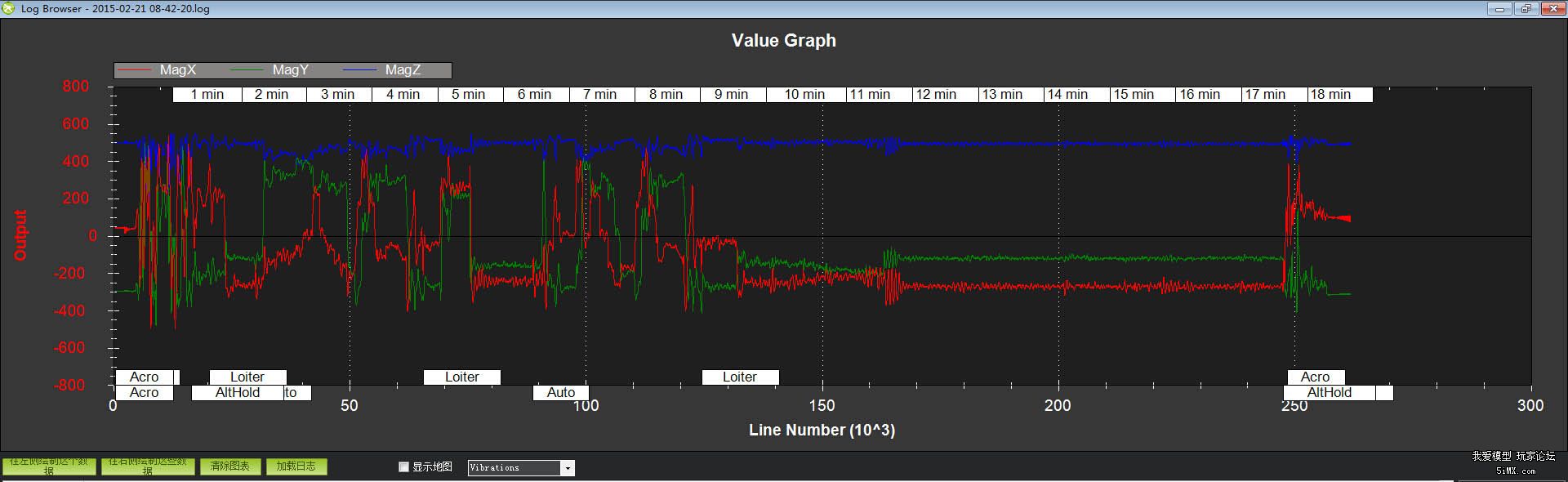
罗盘1的数据~
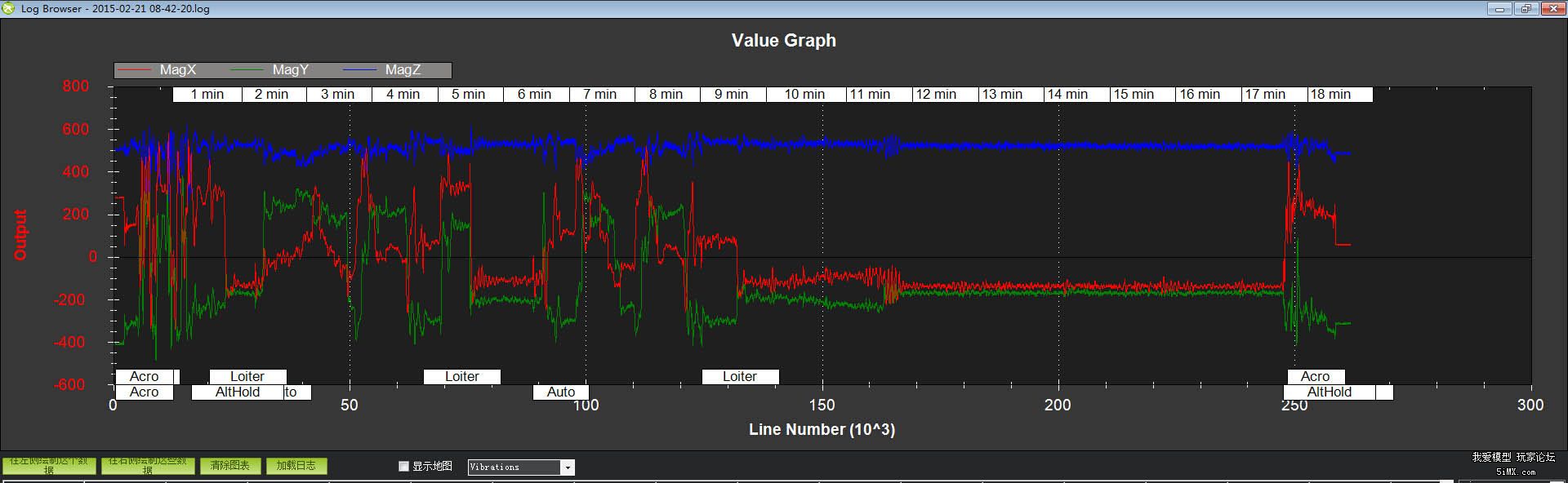
罗盘2的数据~
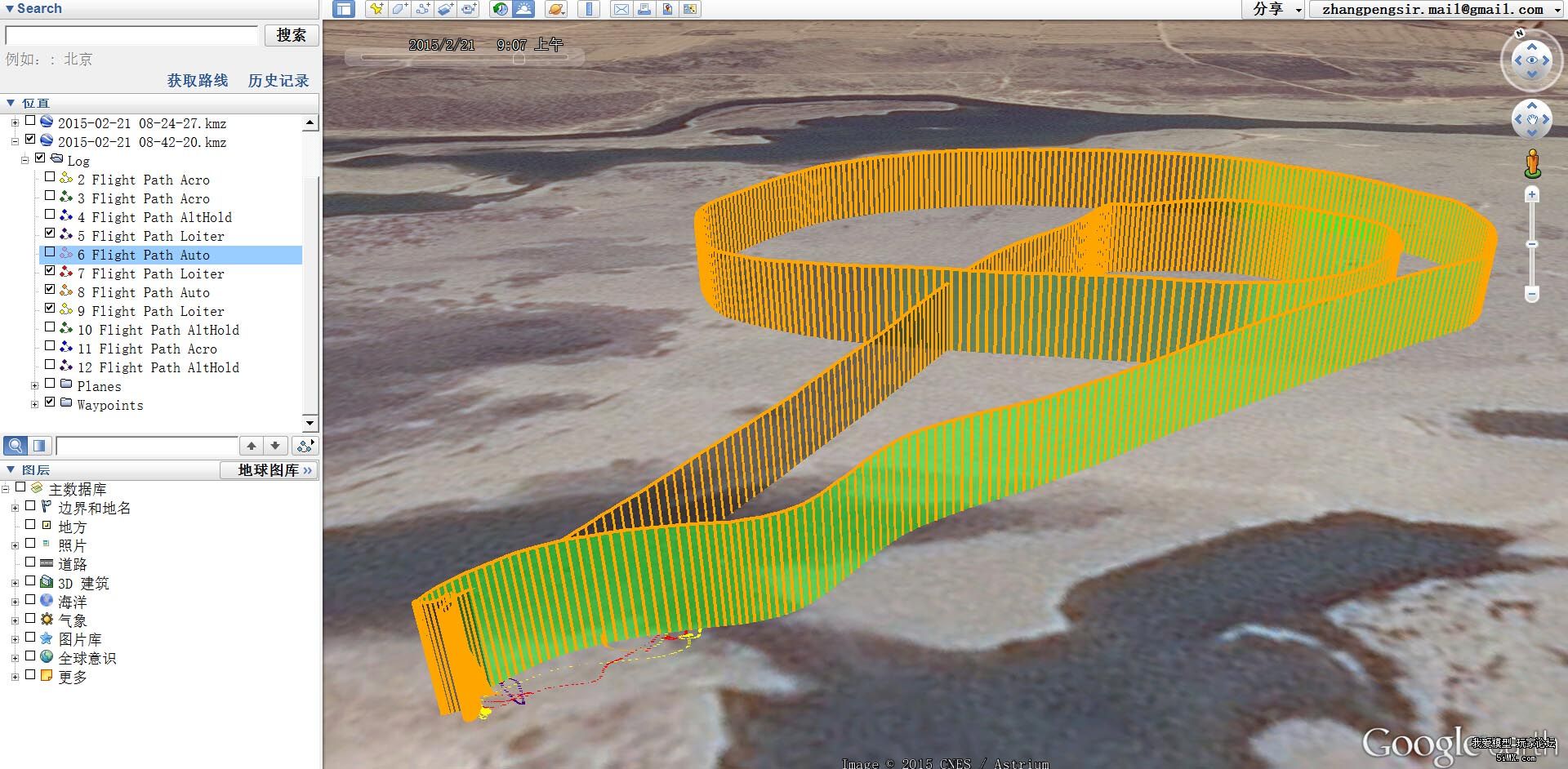
谷歌地球上查阅第一次自动曲线航点的飞行数据~
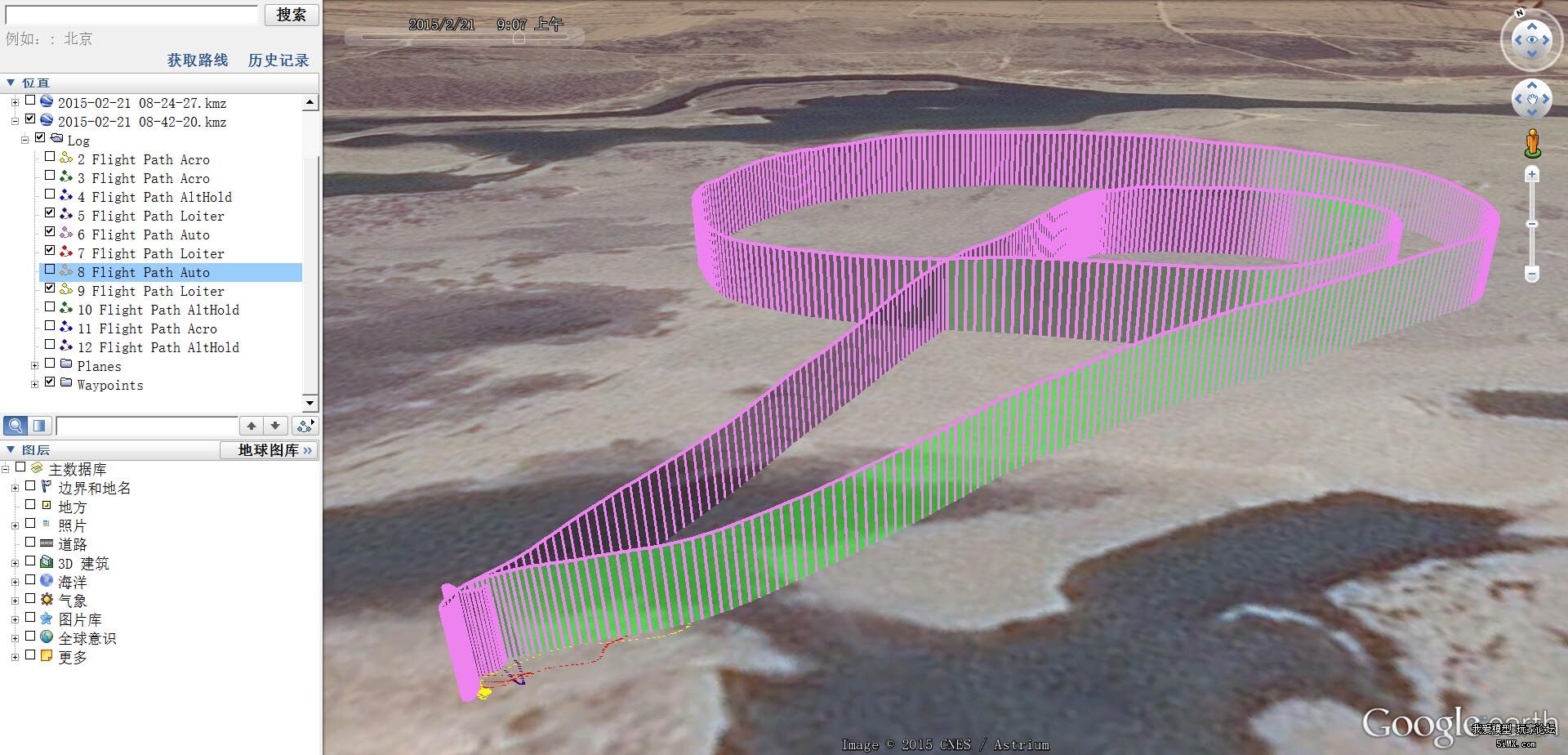
谷歌地球上查阅第二次自动曲线航点的飞行数据~
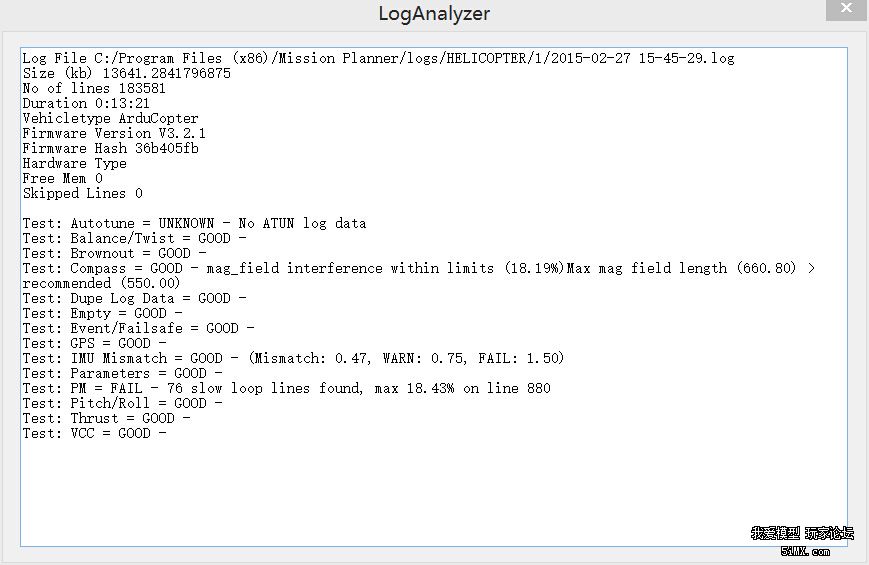
自动分析日志情况!
之后,又做了“低空定点-切换转速测试”:
还有“超低空‘地效’影响下长时间的定点悬停测试 ”:
绕圈模式测试成功,默认半径与角速度:
————————————————————————————————————————————————————————————————————————————
2015大年初七,转战大连飞场,却遭遇罕见暴雪,时间紧迫,场地难得,冒雪测试自动航点与自主降落,成功:









回来之后,机身上都是冰和水,赶快送进卫生间用浴霸来进行烘烤去湿~


日志分析显示定高与航线轨迹都很规范:

————————————————————————————————————————————————————————————————————————————
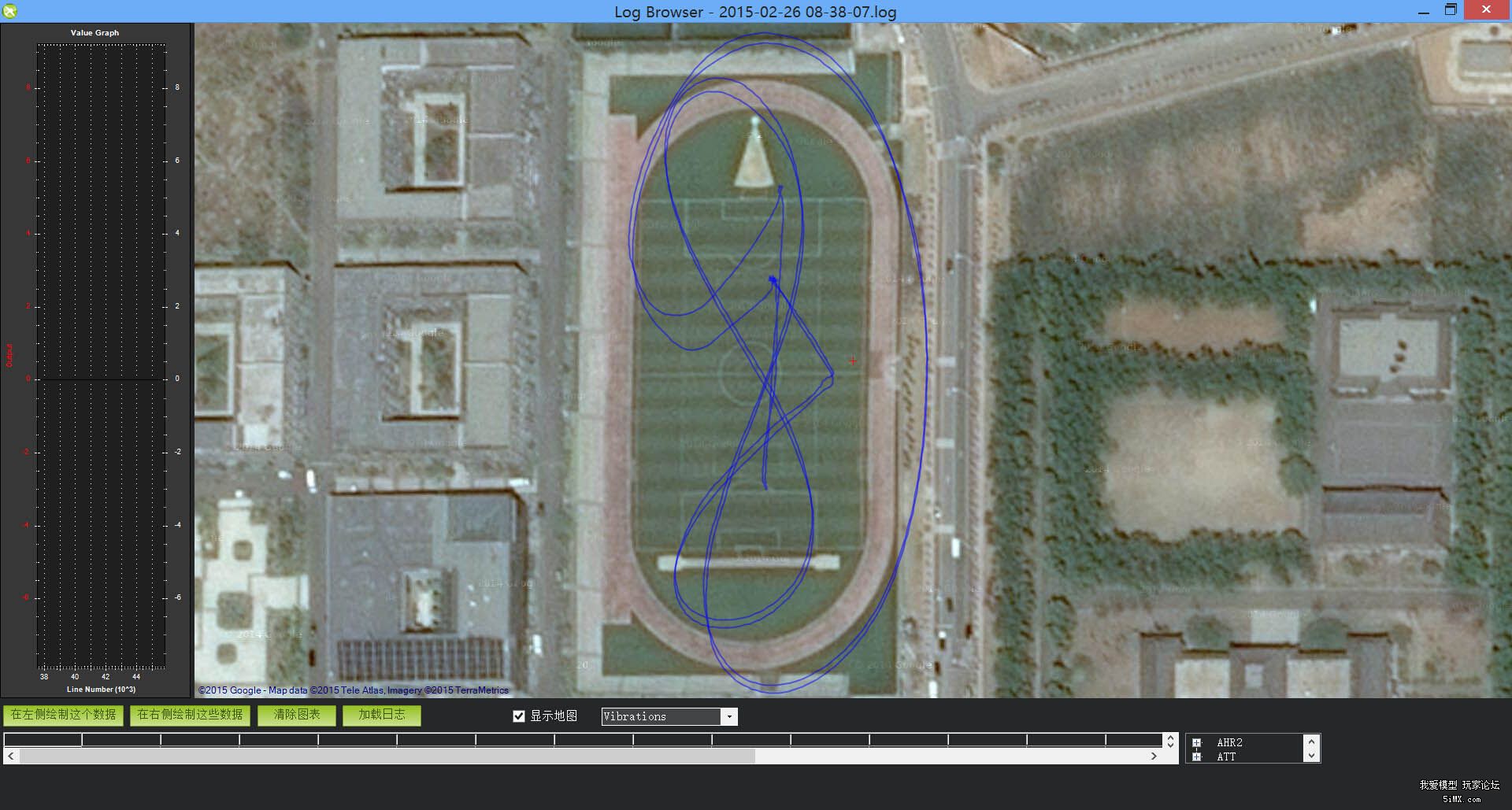
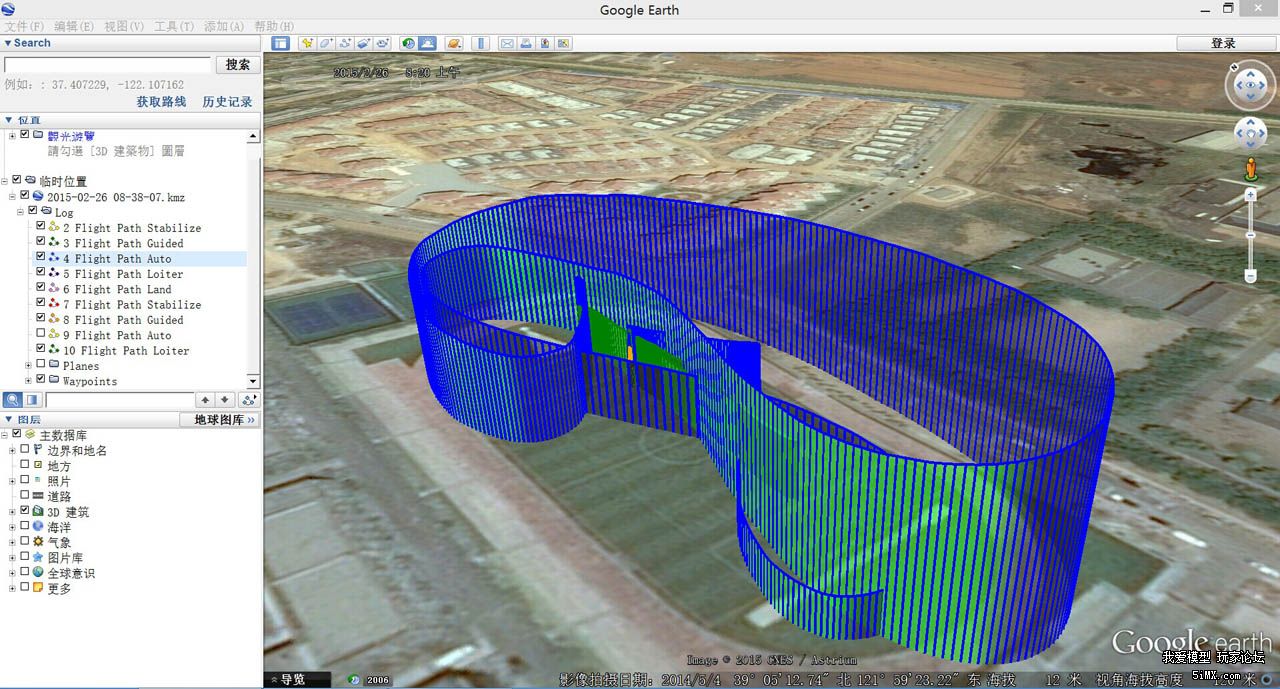
2015年2月26日大年初八,大雪过后,大晴天,测试亚拓500Pro DFC的自主起飞、引导模式、自动(自动协调转弯)航点、自动返航、自主降落模式,成功!
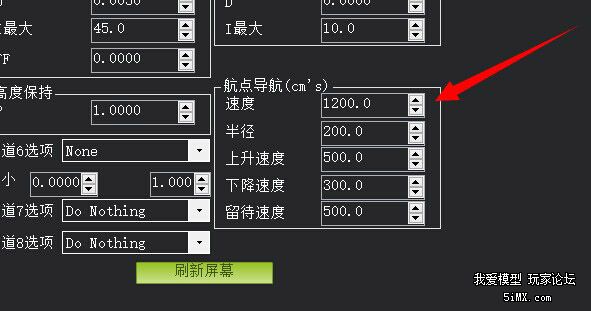
任务航点设计,为了体现航点间的速度,尽力选大跨度的航点,设置为曲线航点(也就是自动协调转弯):
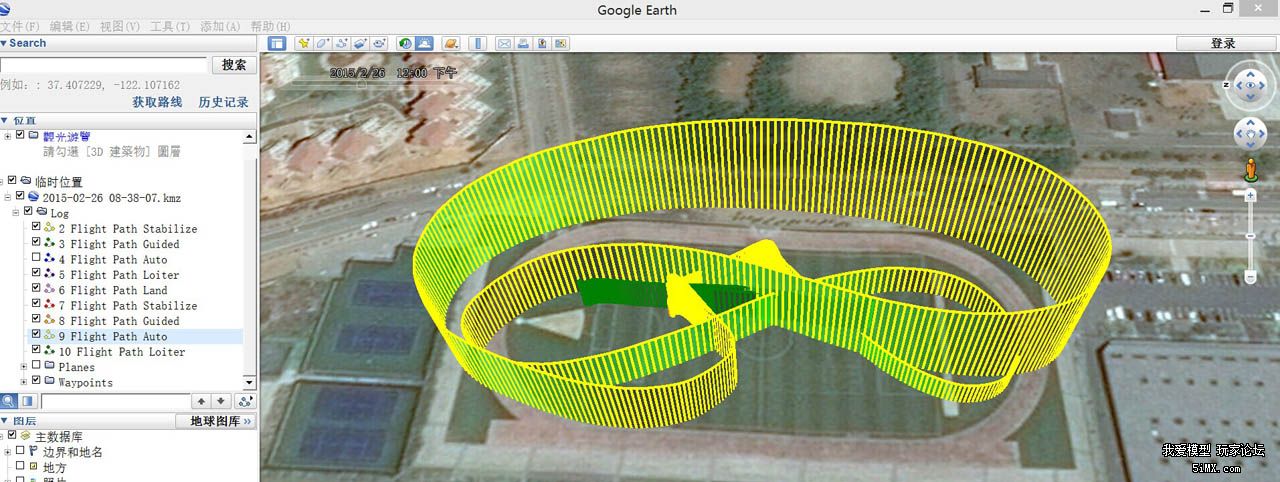
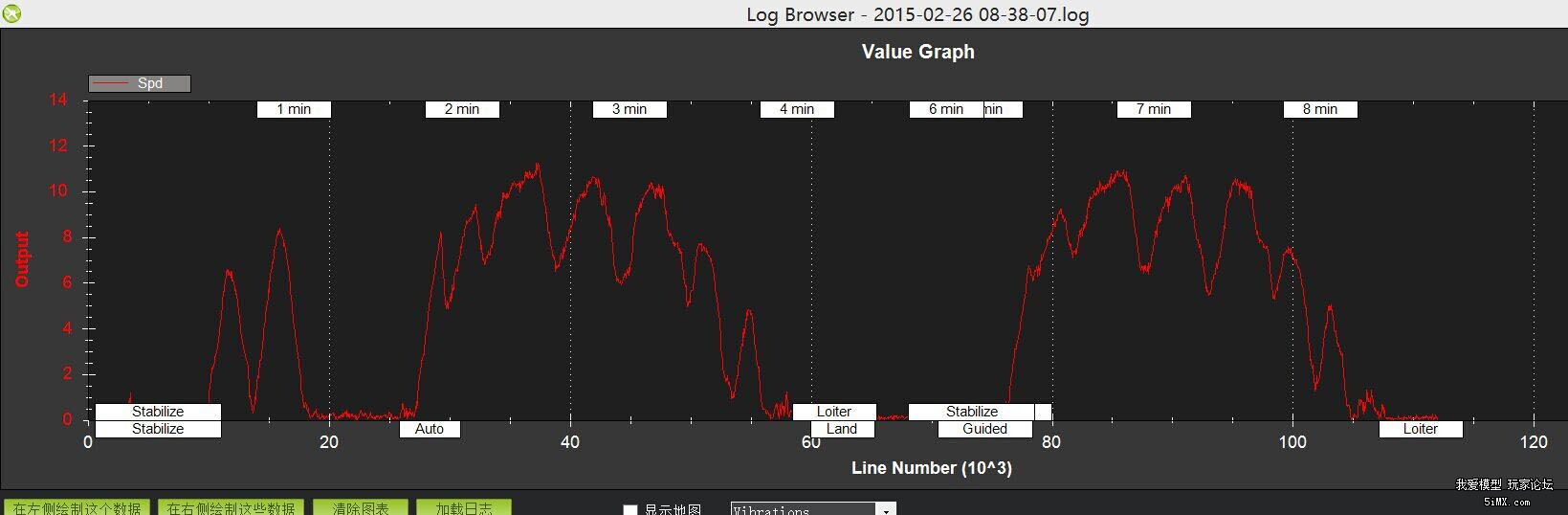
实际两次任务执行的飞行轨迹状况,很平滑流畅:
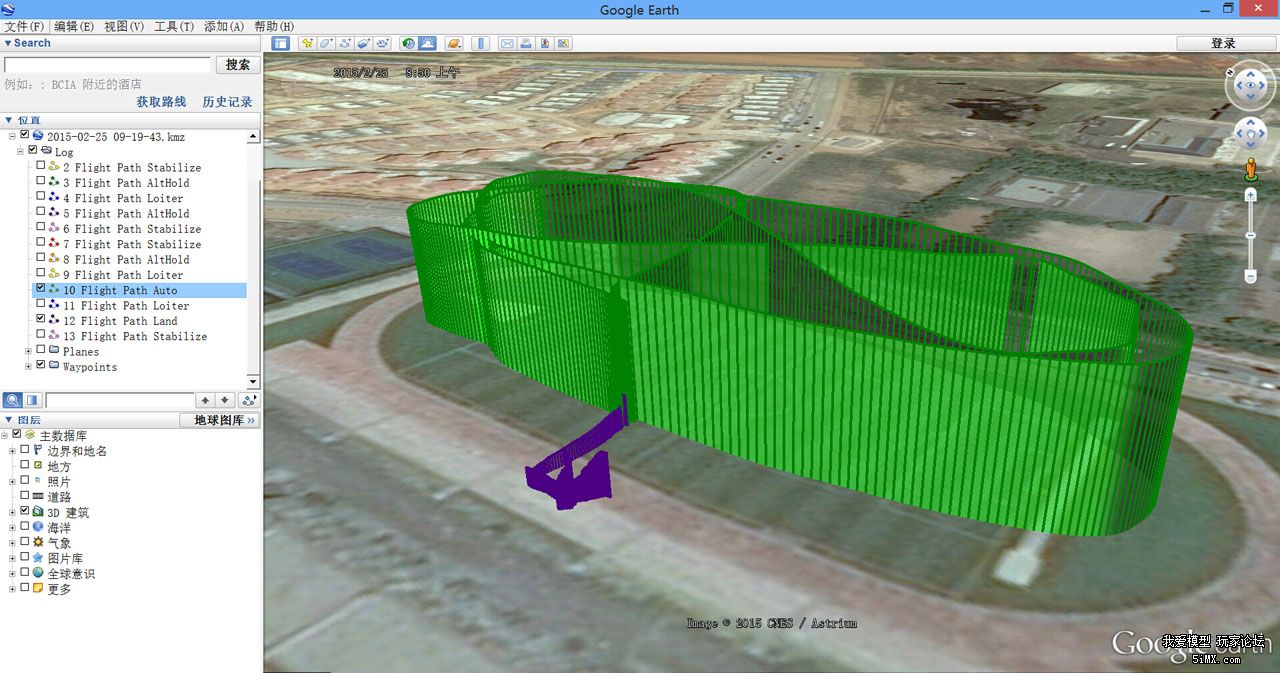
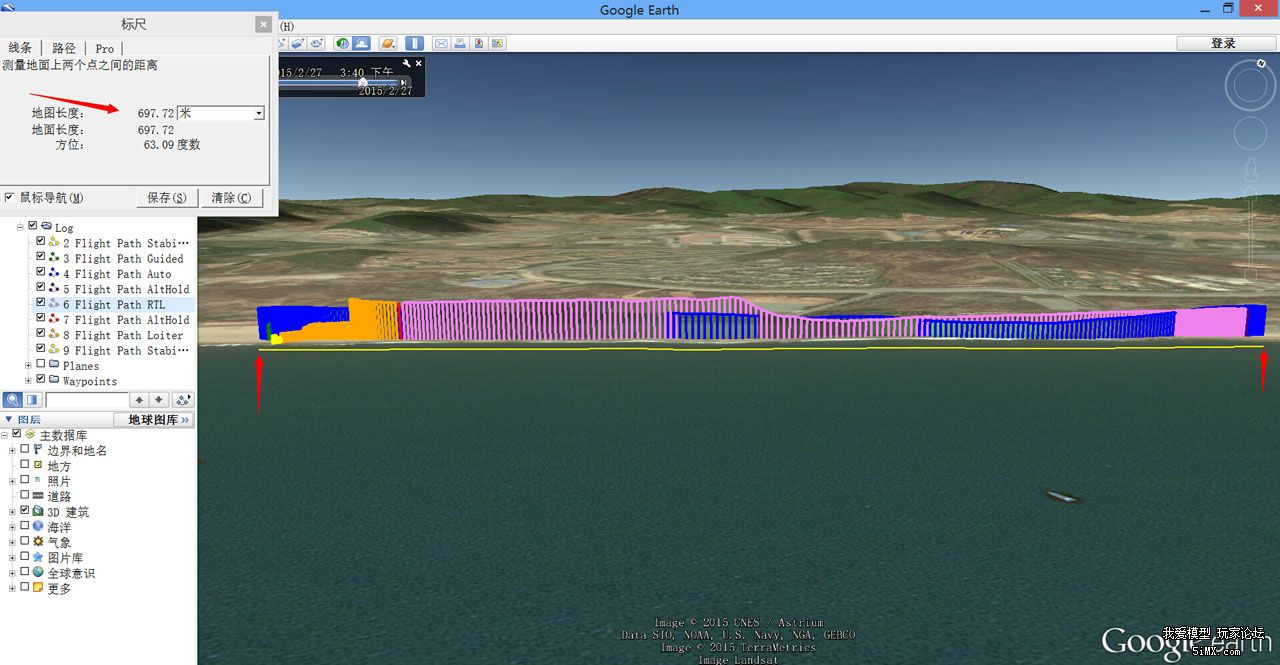
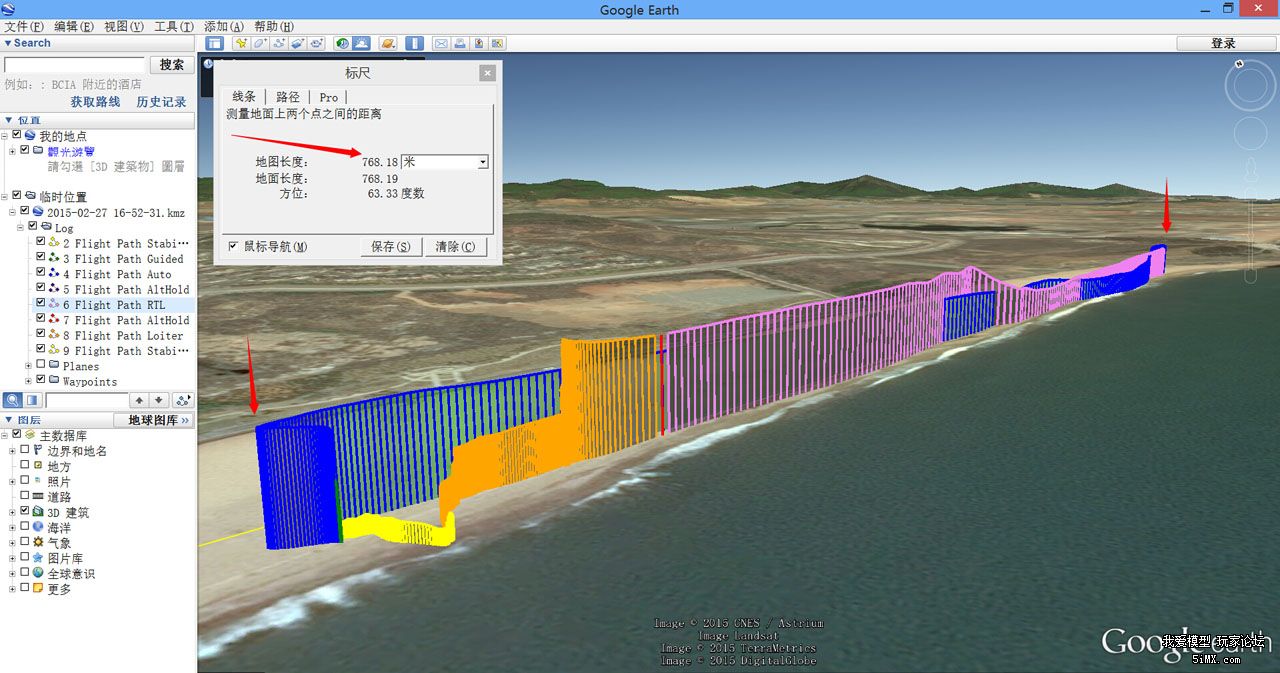
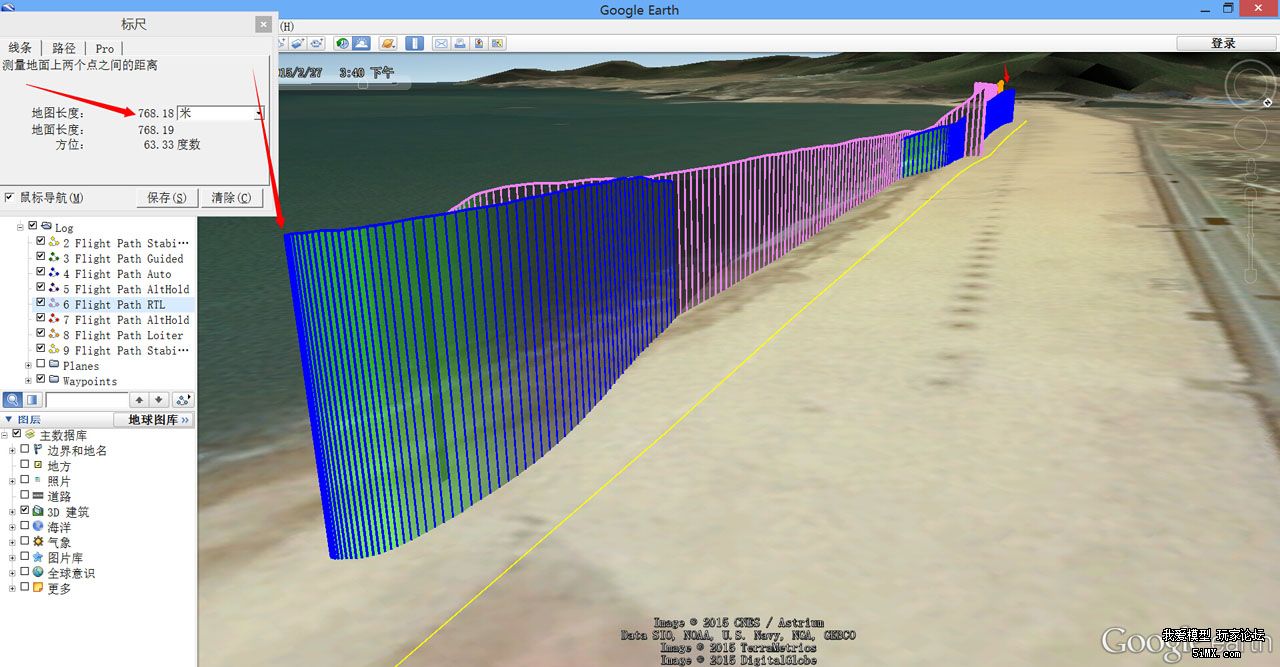
两次航点任务的三维轨迹,因为设置了不同高度的航点,所以,在三维视图中,可以很清晰的看到高度变化的执行情况:
引导模式(图中直线)与绕圈模式的执行情况:

引导模式与绕圈模式是维持当前高度的:

最大航速设置,还没有发挥出直升机的优势:
趋于理想的PID设置,只需要再适当增加“自稳模式”的P感度,应该就很理想了~
配图:





失控返航模式测试失败,关控后,飞机直接原地拍在地上~


已满血复活,查找原因,等下次测试再更新…………
————————————————————————————————————————————————————————————————————————————————————
2015年3月3日更新,离上次更新,已经有好几天了!
不更新的原因,是因为上次的“失控返航”测试失败,不单纯是炸坏了脚架和减震床。第二天测试飞行,发现飞控表现异常,各种异样。后来,确认飞控的主控中加速度计出现了问题,已经无法进行测试飞行!
Pixhawk双GPS飞直升机调试-飞控出现异常:
所以,只能停工,返修飞控主控板!
还好,飞控卖家是个爽快人,立即更换了一块他自己在用的飞控板过来,还顺便把M8N GPS的天线更换成更大尺寸的!
之后,利用手里的另一块飞控,直接导入原参数设置,又继续开始了测试~
换了新的飞控后,还是要确定基础的定点悬停会不会有问题,所以,还是要先测试一下Loiter模式的稳定性:

2月17日下午,经过重新调整后,“失控返航”终于测试成功:
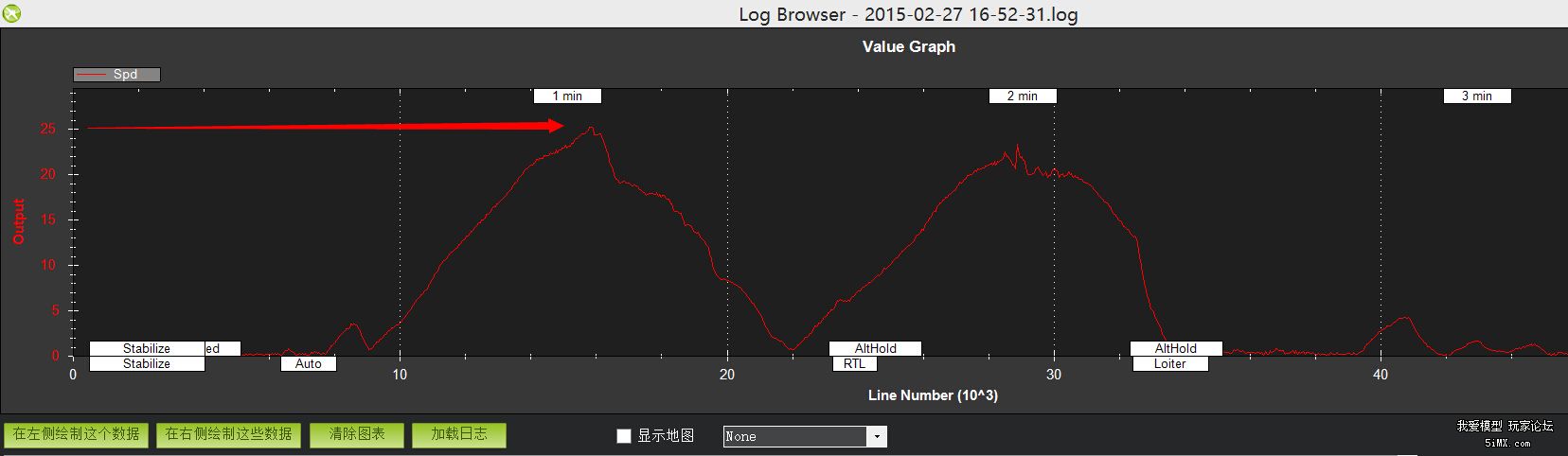
随后,更换场地,尝试超视距高速自动航点的飞行情况,就转战海边沙滩~
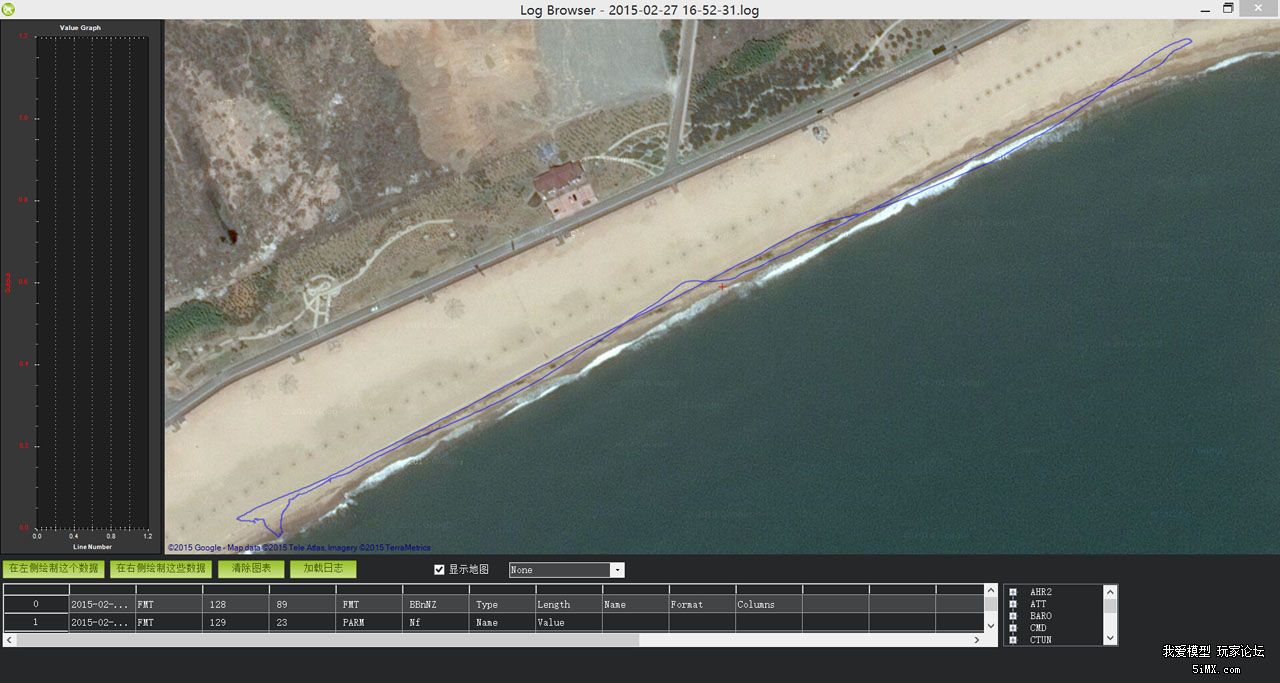
抱着飞丢飞机而“提控回家”的准备,经过紧张的等待和无比的担心,超视距大航线测试成功,最大航速设置为35M/s,实际飞行最高航速达到了25M/s,也就是最大时速达到了90KM/h~
日志回顾中,查看,最远点达到了790米,数传肯定是没有了信号,但遥控器信号还有,没出现失控现象,飞机按照预定计划,飞回来了!但有几处丢星的点,路线要有偏移~
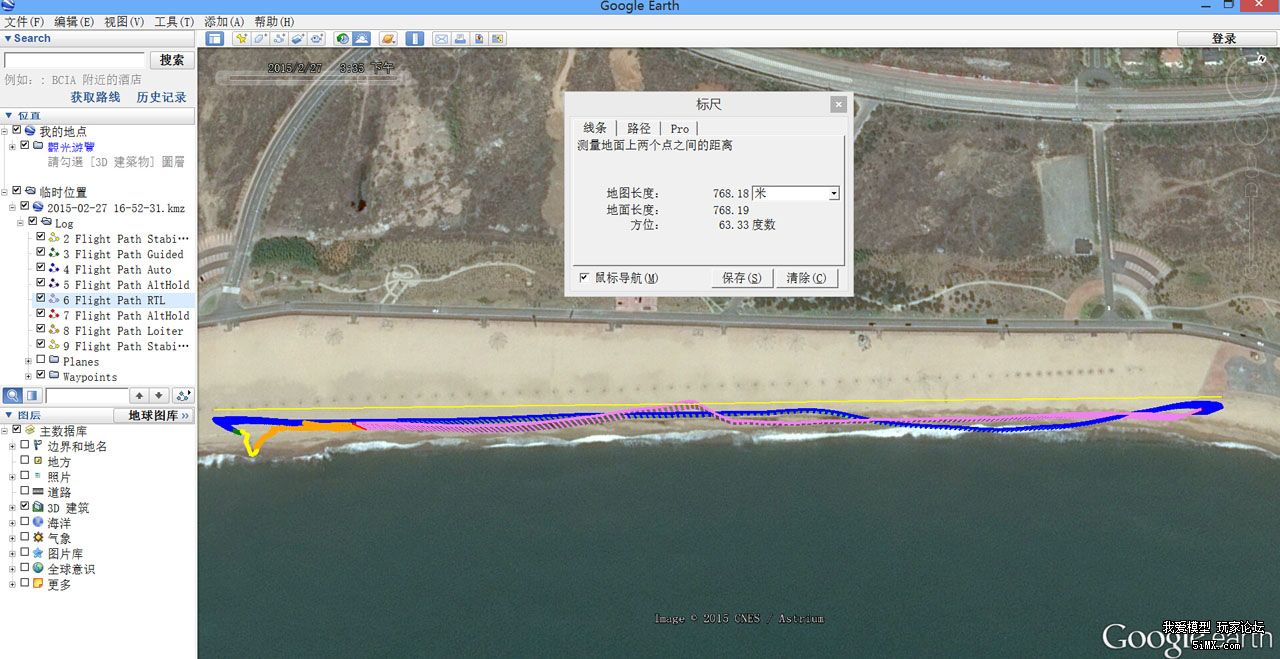
航速高了,略有调高,应该是飞机没有设置定速模式导致的,后续会更换更好的定速电调再测~
看着自己飞回来的飞机,心情大好,就悬停拍了几张~




————————————————————————————————————————————————————————————————————————————
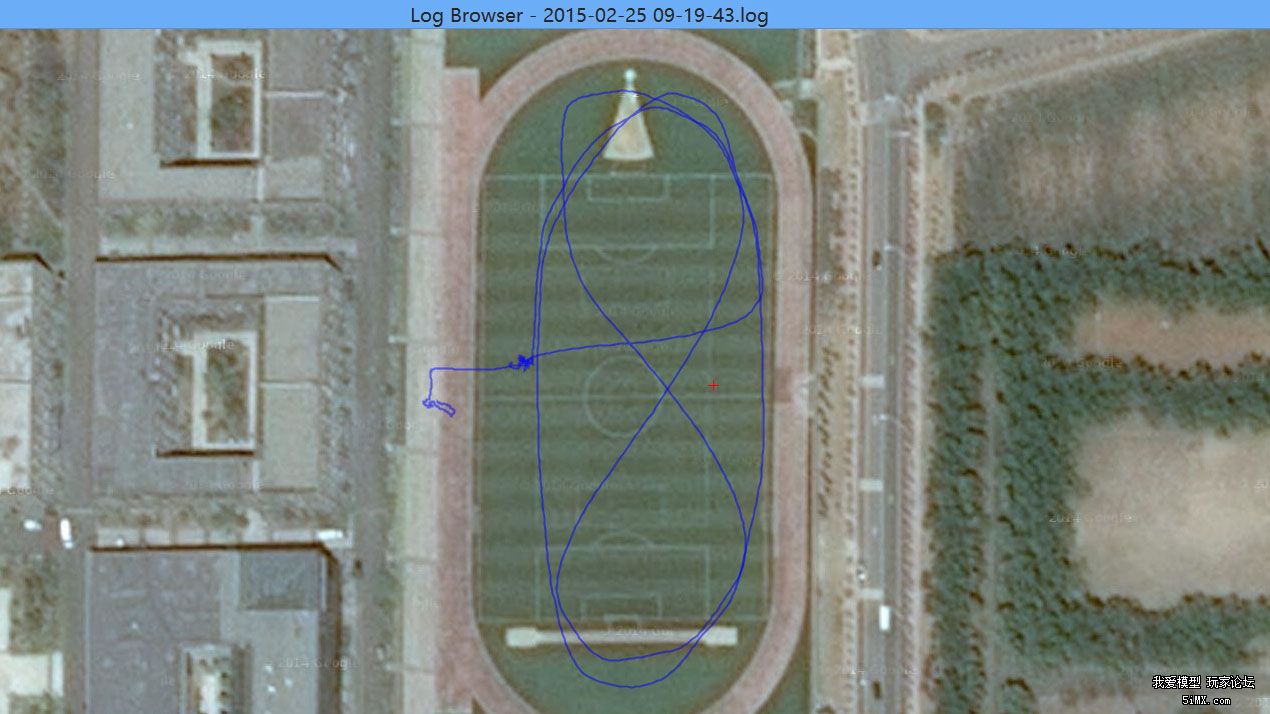
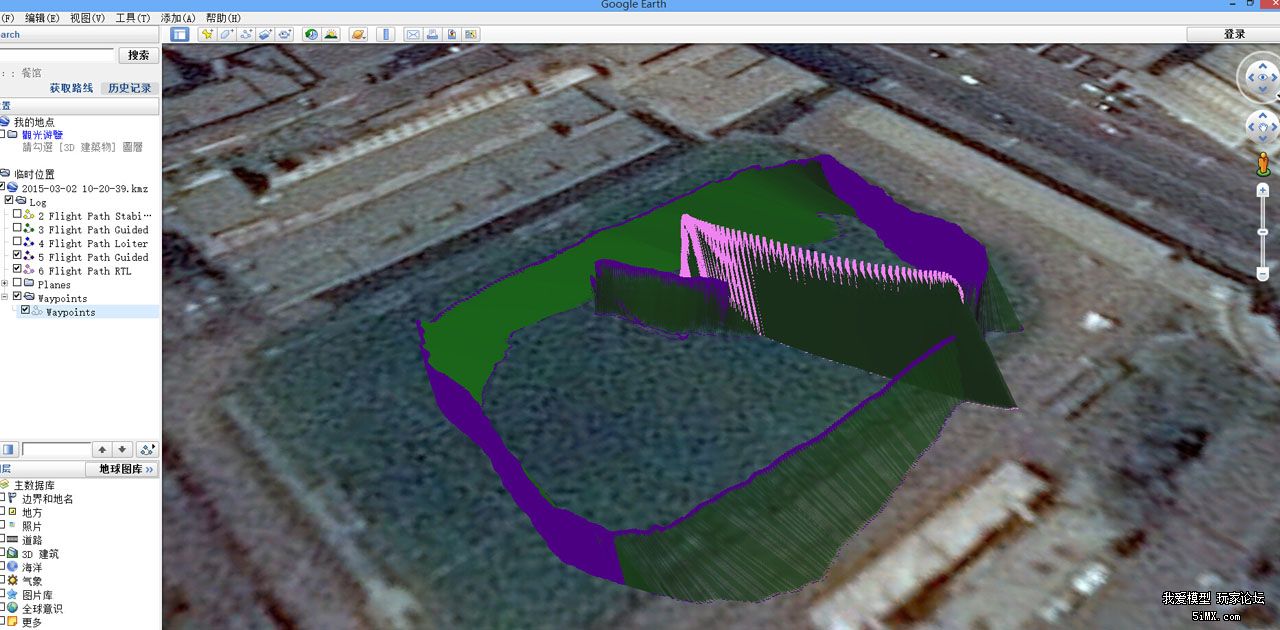
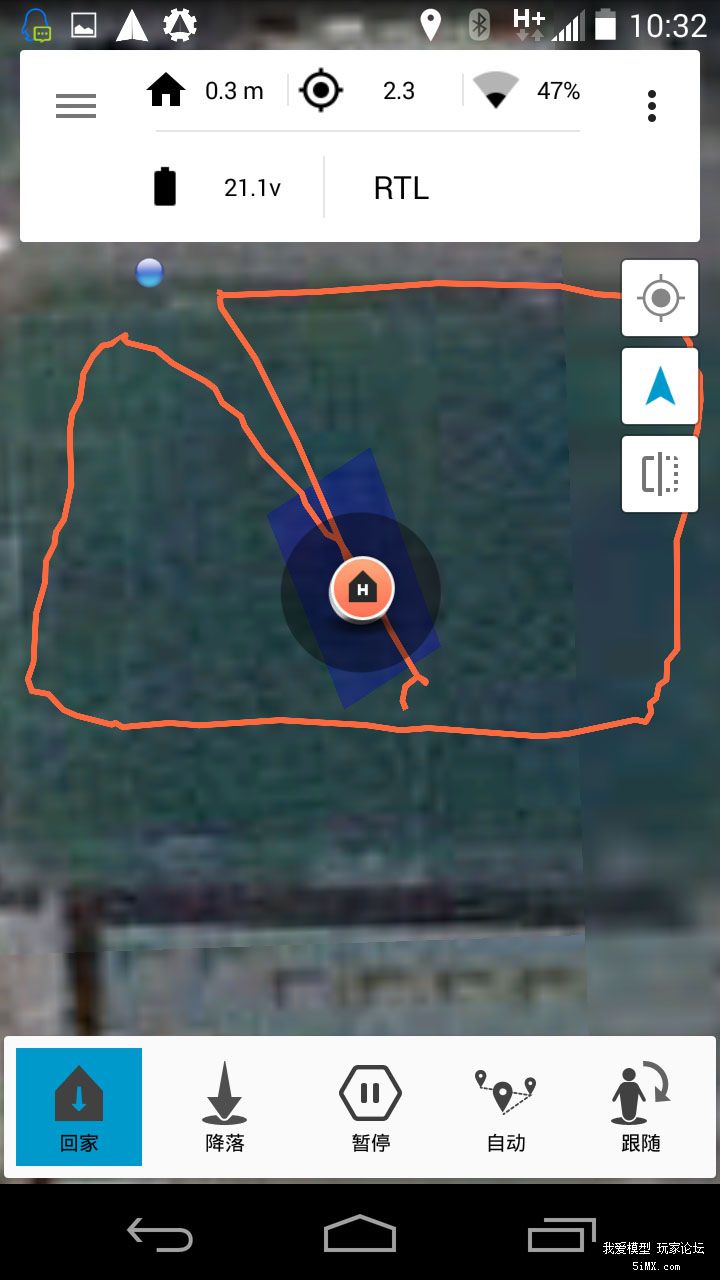
2015年3月2日,返回主场地,并将双GPS 的 6M + M8N, 更换为 6M +6H,鉴于飞控与飞机状态一直稳定,就大胆尝试开启500级直升机的“自动跟随”模式测试,获得成功。限于场地和设备,没能挂载空中视角的摄像头,也没有高速的地面目标移动,所以,视频的效果不太明显,但稳定程度很明显~

绿紫色,为跟随模式的路线;粉色路线,为自动返航路线~

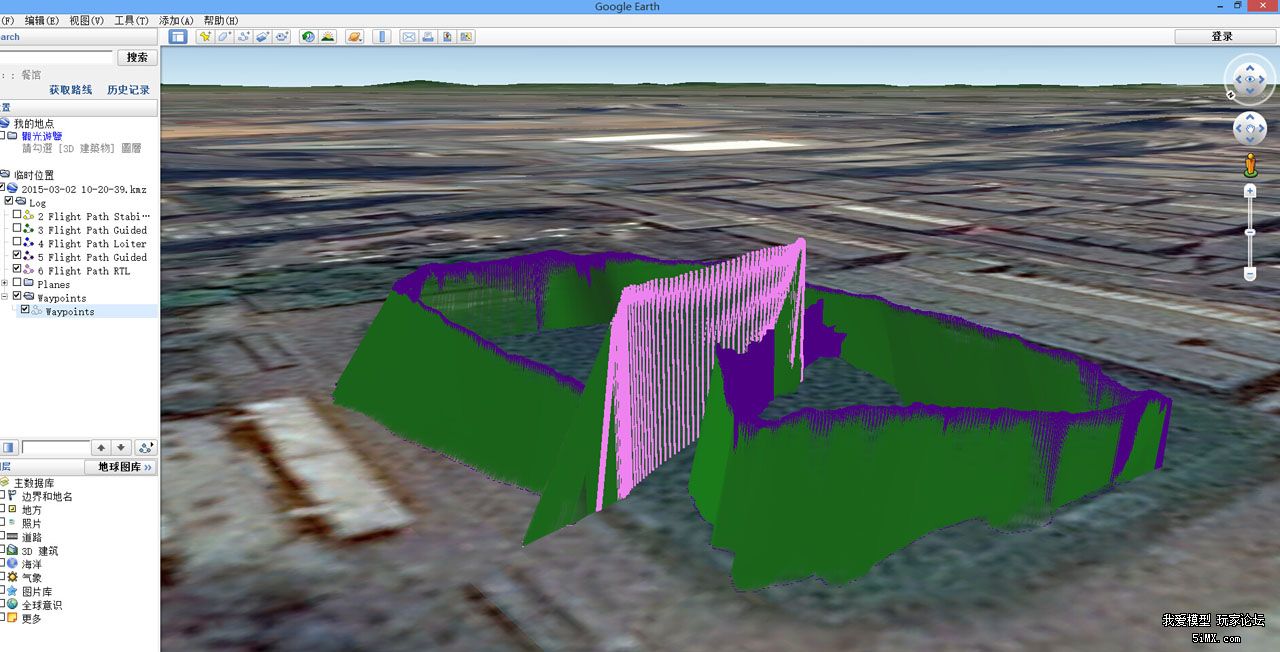
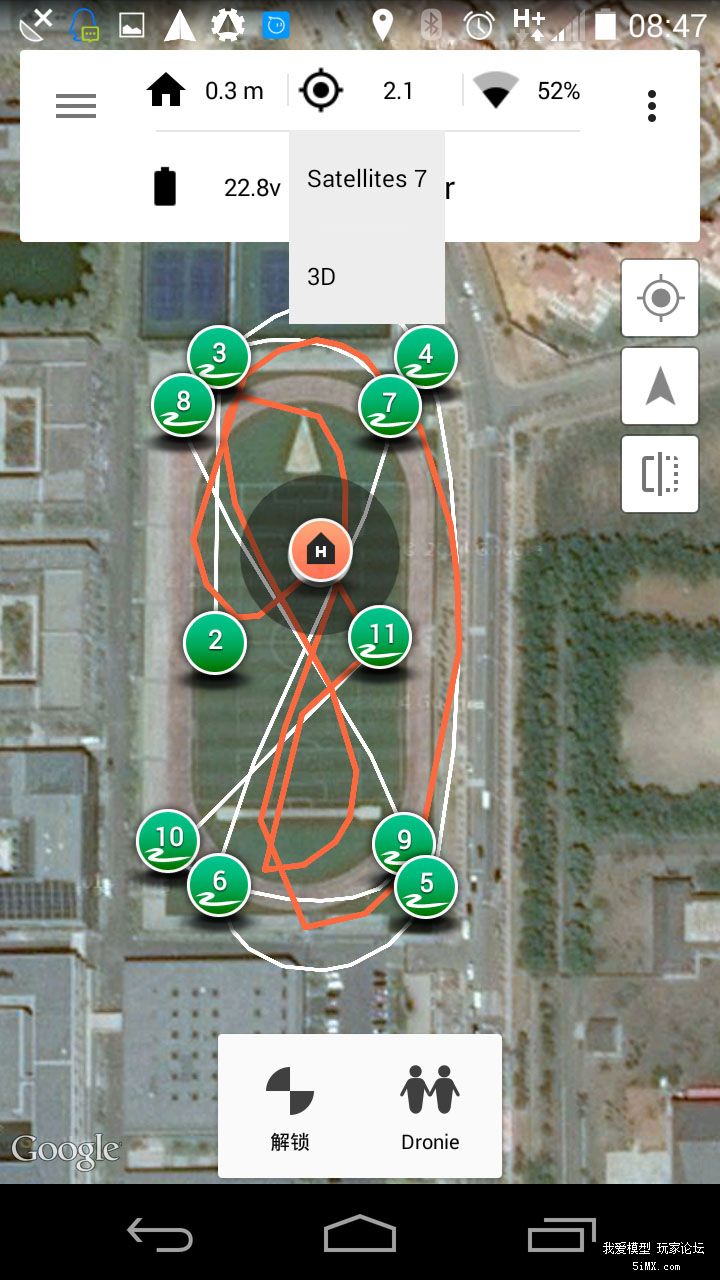
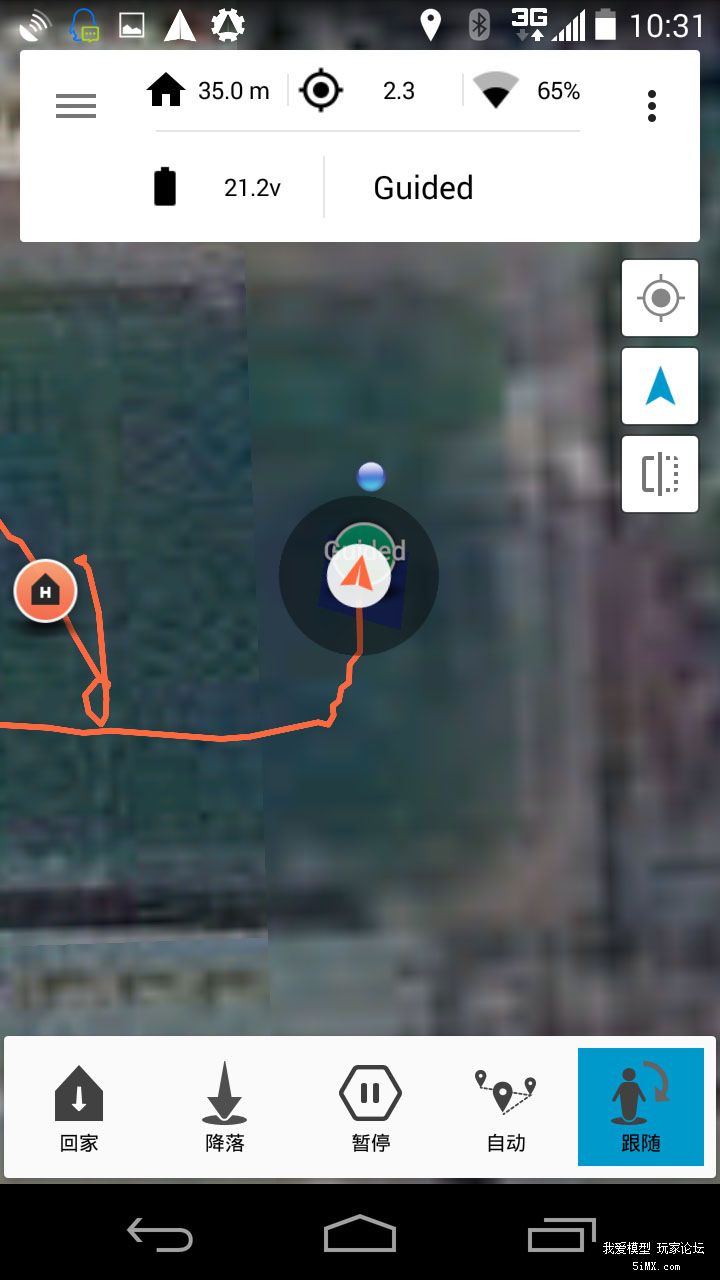
手机地面站上的路线:
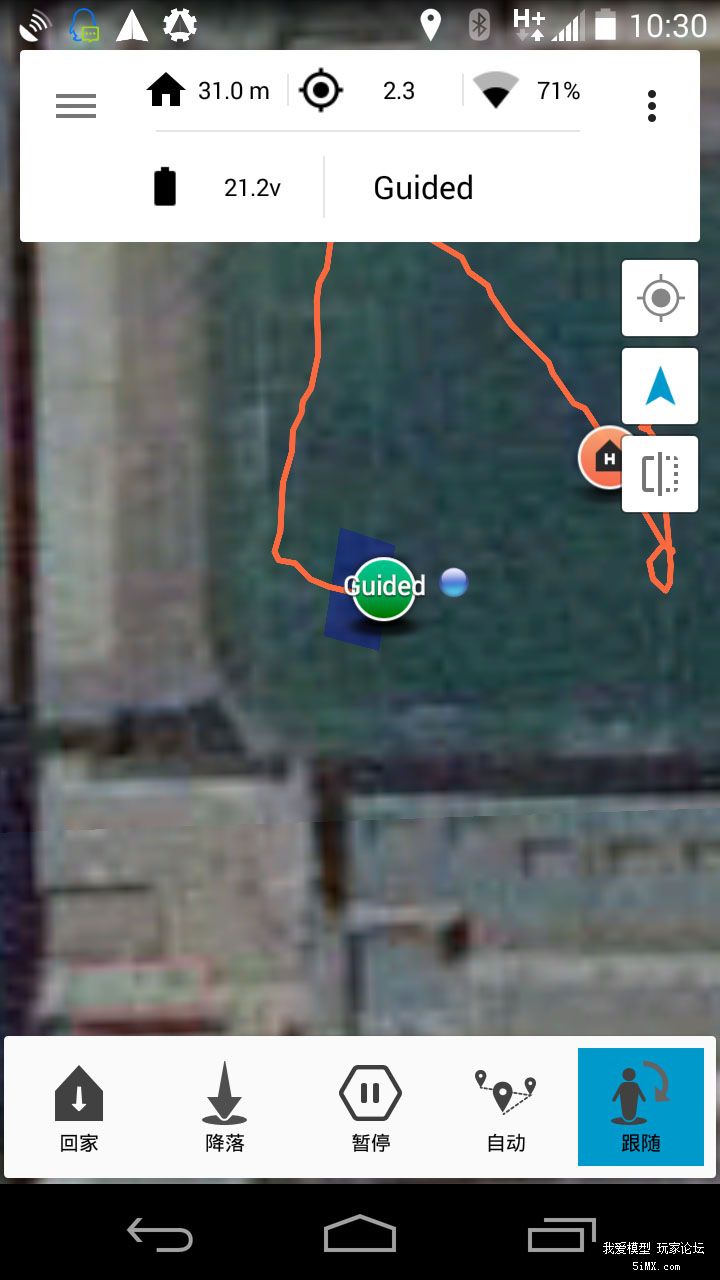
最后切RTL自动返航 :
3月3日早晨,就在公园湖边测试了5级北风下的定点模式抗风情况:
至此,开源飞控、双GPS模式下,直升机的自主起飞、定点定高悬停、引导模式、绕圈模式、自动航点飞行、自动协调转弯、高速自动航线、自动返航、失控返航、跟随模式、自主降落,全部测试成功!!!
感谢大家的支持与关注!  
全文完
|



 /2
/2 



 发表于 2016-5-24 11:10
发表于 2016-5-24 11:10

 收藏
收藏
 楼主
楼主
