现在还没想好头和尾巴做成什么样子的。尾巴是可以省的,头还是需要一个的,想装一个机械手,也想装一个云台,用来装无线摄像头。不知道哪种好。
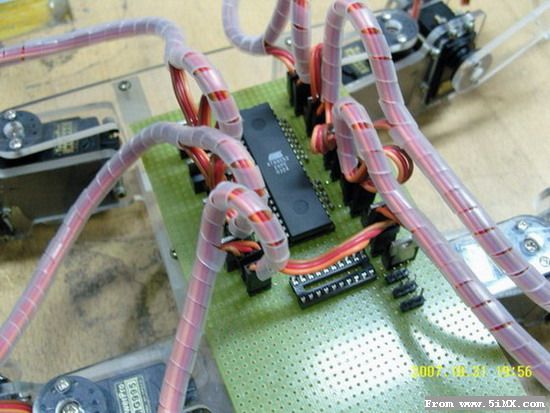
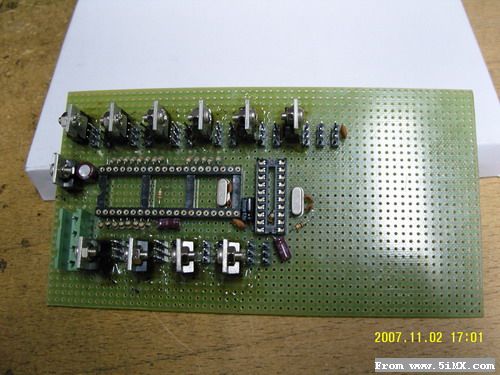
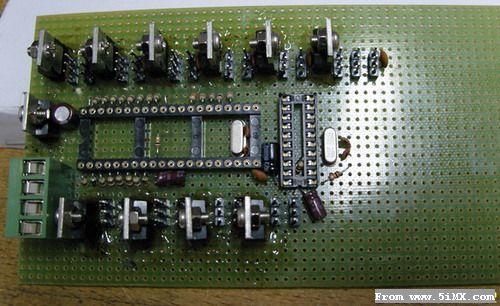
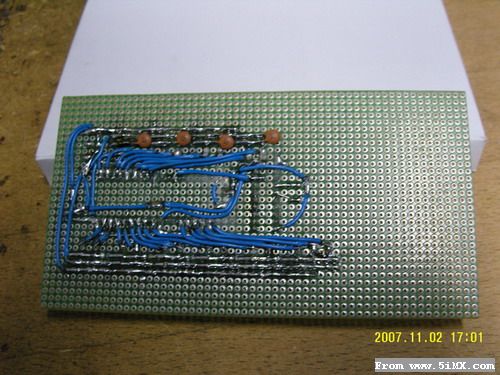
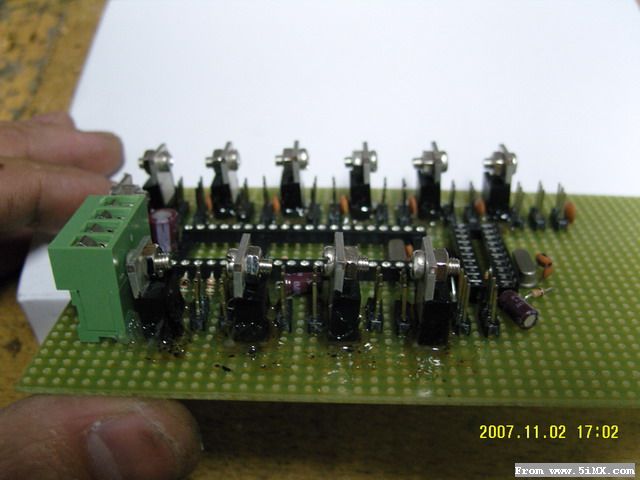
本来想从网上定个24路舵机驱动板的,因为它有一个上位机控制软件,可以很方便地调整每个舵机的位置(舵机的一致性不是很好,同样送1.5毫秒的信号,有些舵机盘是居中的,有些是偏的,有个现成的上位机软件,调起来比较方便,但是那东西报价太高了。自己能做,还是自己做一个,而且对于MG995舵机,和普通的3003或者9252之类的舵机驱动是有点不一样的。以前做人型机器人的时候就发现,用单片机的IO口是不能直接驱动MG995的,口线电流不够,必需得加一级放大电路(直接用来驱动3003和9252倒是没问题)而网上卖的驱动板,看照片都是IO口直接输出的,还必须自己加放大电路,还不如自己做呢。 |



 /1
/1 



 发表于 2007-10-30 12:05
发表于 2007-10-30 12:05


 收藏
收藏 楼主
楼主