MEGA8具有AD转换电路,可以直接将待检测的
电路接入ADC端口,检测电压的值,但是对于反电势
过零法而言,要获得的并不是具体的反电势电压值,而
只是反电势的过零点,因此如果直接使用MEGA8 的
AD功能,虽然在电路上是简化了,但是在软件的编制
上却带来了很大的问题,首先AD采样不仅使软件程
序编制复杂,而且运行AD采样将占用过多的MCU运
行时间,降低程序的实时性。而实际上只需要根据式
(1)确定反电势符号改变的时刻,就可以认为检测到
过零点。因此在设计中采用了专门的过零点检测电
路,使用简单的硬件电路解决软件AD采样和电压比
较的复杂过程。实际电路如图4 所示(U 相电路) 。
当截止相U反电势到达过零点时, LM339将产生一个
脉冲。
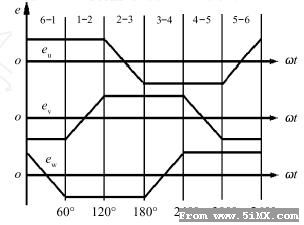
根据式(1) ,当反电势为零时有2uU = uV + uW , 从
图中可见,当uU从+ → - 过程中, outputU 处产生一个
下降沿脉冲,当uU 从- → +过程中, outputU 处产生一
个上升沿脉冲。单片机通过检测脉冲的变化,即可得
到过零点的位置。
2. 2. 3 电机驱动电路设计
对于永磁无刷直流电机,从图3中可见,每一个周
· 1 3 · 航模直流无刷无感电机调速控制系统设计
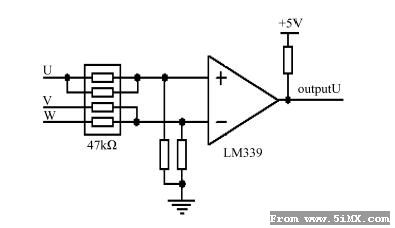
图4 反电势检测电路(U相)
期由6个60°的扇区组成,每个元件导通120°,即在两
个连续的扇区中导通。因此有2 种PWM调制方式:
半桥载波和全桥载波。对于永磁直流电机而言,无论
是上半桥载波还是下半桥载波,截止相都会产生续流,
导致其余两相电流产生波动,电机转速越高,相应的波
动也就越大。而采用全桥载波,则始终有两相导通,截
止相不会产生续流,电流波动和转矩脉动都较小。当
然全桥载波也有不足之处,全桥载波时功率管的开关
损耗是半桥载波方式的2倍。
在本设计中电机的驱动采用全桥驱动电路,使用
一对P沟道和N沟道的POWER MOSFET控制。电路
如图5 所示。MEGA8 单片机具有3 个硬件PWM通
道,可以实现任意< 16位、相位和频率可调的PWM脉
宽调制输出,因此在设计中直接使用硬件PWM功能。
从速度和精度上来讲,硬件PWM都优于软件PWM,
而且使用硬件PWM不仅不需要增加外围电路,还可
以减少软件编程的难度。

图5 电机驱动电路(U相) |



 /1
/1 



 发表于 2006-10-26 08:29
发表于 2006-10-26 08:29

 收藏
收藏