本帖最后由 不死春哥 于 2015-8-8 23:21 编辑
前段时间灰机放着接灰,昨天又拿出来耍耍爽炸,新遥控没调好,油门推到顶居然是怠速运转,还以为是电池电机什么的出问题了靠,损失一个机臂又得更换了。好消息是今天无聊翻翻地面站和这个
发现了些以前没注意的东西以下先看看图片 
 以下是个人总结看图理解
以下是个人总结看图理解
蓝色方框:
转速P:螺旋桨的旋转速度(螺旋桨的旋转速度与飞机旋翻滚速度也和D有些关系,也跟电调和电池有关)
平衡I:翻滚中飞机到达平衡的速度(自稳的修正速度,很多悬停会抖估计跟这个有关,通过炸机来辨别是不是正确的)
信号D:接收机接收信号到飞机做出改变的速度,越高飞机响应越慢,反之相反
黑色方框:
角度P:每秒钟飞机做出动作的幅度快慢也算是大小,比如120°多高的数值每秒就翻滚几度(几除以几那样来算)
I:不管他
分几段来讲当飞机半自稳翻滚时上面数值应该是这样组合完成一个动作的
1.悬停到 往右 打杆初期低数值信号D让飞机马上反应过来(好比问你1+1和34232432+43543=多少,你脑袋反应的快慢)
2.这时候大数值转速P和低数值信号D告诉飞机(对尾看)右侧2个立马减慢转速,左侧马上加大转速,单单看飞机在大数值角度P的作用下飞机一般会快速翻滚
3.当翻过去松杆后飞机想恢复水平这时候平衡I就告诉飞机你必须马上平衡也就是自稳现象,那么为什么有的自稳和反过来会出现抖动和往一边飞呢(排除水平后飞机的翻滚方向的余后惯性)应该就是转速P平衡I角度P了,这个只能在飞行测试中协调了。
进阶总结:
1.想飞机翻大圈速度又快的建议偏高:转速P 角度P,稍小:平衡I
2.想大圈又慢的(掉高严重)适中:转速P 角度P,适中:平衡I(避免翻滚半径过大炸机)
3.想小圈又快的建议加大转速P 平衡I 信号D 角度P
4.小圈又慢的(掉高轻微)加大:转速P 角度P,偏高:平衡I(避免翻滚半径过大炸机)
在自稳和半自稳中间的惯性作用的效果就不讲了大家都能理解,不理解的自己脑补物理知识,单独加大某个数值应该不会出现炸机,当然以上这些只是理论而已,还有初级和专家的,进阶要配合初级的参数调整。
|



 [复制链接]
[复制链接]
 /2
/2 



 发表于 2015-8-8 23:14
发表于 2015-8-8 23:14

 收藏
收藏 楼主
楼主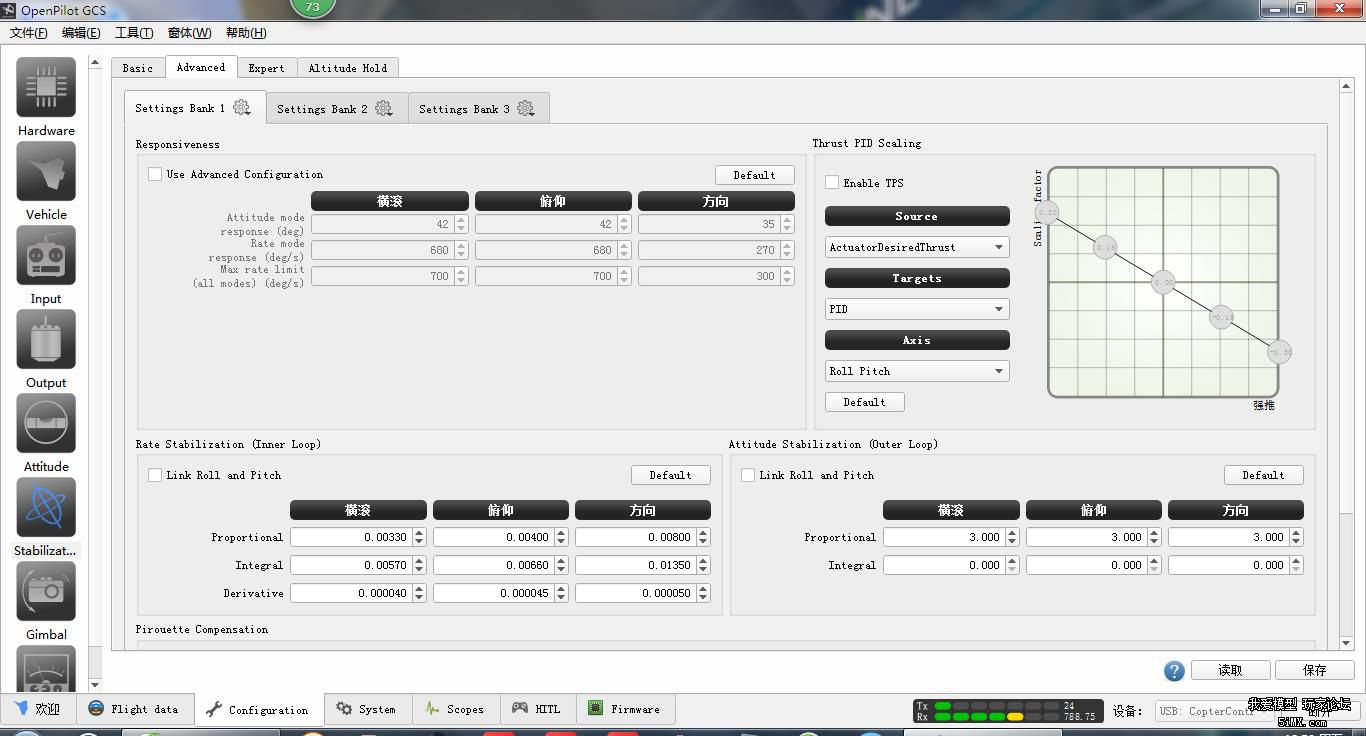
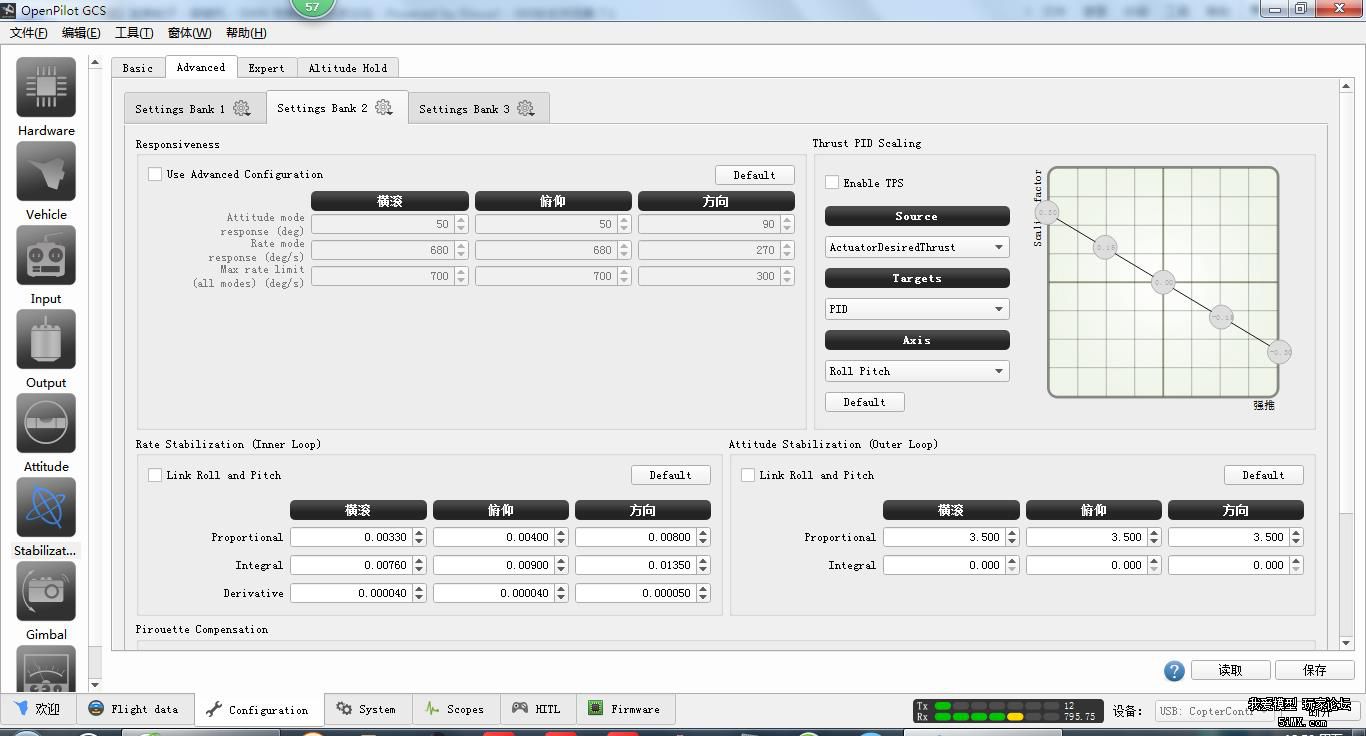

 第二个是半自稳RRA,我用的是这个模式,2和3的设置是用来半自稳翻滚的,遥控器那张图是之前的,所以只有一个半自稳模式
第二个是半自稳RRA,我用的是这个模式,2和3的设置是用来半自稳翻滚的,遥控器那张图是之前的,所以只有一个半自稳模式




