|
“工欲善其事,必先利其器”。在进行无人机飞控开发时,选择一个合适的软硬件平台以及IDE是十分重要的。目前,APM飞控成熟度高,开发工具齐全,社区建设完善,开发者文档丰富,适合开源选手入门和二次开发。因此,本系列博客以APM飞控作为切入点,在Windows环境下介绍其代码结构和开发应用。
APM系统介绍
APM全称ArduPilotMega,Ardu源自Arduino,Pilot意指飞行,Mega代表主芯片为ATMEGA2560(Atmel公司的8位AVR单片机)。是的,没有看错,一个简单8位单片机竟完成了如此复杂的飞控任务! 51单片机表示哭晕在厕所,同为8位出身,命运截然不同。笔者大概是2011年接触的单片机,当时也同大多数初学者一样,从经典的51单片机入门,一个个模块、寄存器的学习,曲线虽说不上陡峭,但至少不那么友好。反观Arduino,近3年在国内迅速崛起,除了Geek文化和开源文化的普及,一个很关键的原因在于Arduino让不懂硬件电路的普通人(甚至小学生)也能轻松上手硬件了。没有了烦人的寄存器,没有了纷繁的头文件,一个setup()和一个loop(),再加一个自带教程的简洁IDE,Arduino名副其实——源自意大利的男姓用名,意为“强壮的朋友”。世界如此美好,我想和Arduino做朋友。
APM内置六轴MEMS传感器MPU6000,气压计MS-5611,三轴磁力计HMC5883,一般还会配置GPS模块,以便更精确的惯性导航。其中,MPU6000整合了三轴陀螺仪和三轴加速度计,积分可得速度和位姿。MS-5611通过测量气压得到高度,辅助GPS定位。HMC5883通过测量地磁场得到方位,辅助无人机定向。飞控采集并融合多种传感器的数据,计算并校正无人机的位姿。给APM一张正面裸板特写!

APM与PIXHAWK的关系 说到APM,就不得不提它的进化版:PX4和PIXHAWK,来自苏黎世联邦理工大学。“PX4是一个软硬件开源项目(遵守BSD协议),目的在于为学术、爱好和工业团体提供一款低成本、高性能的高端自驾仪。PX4FMU自驾仪模块运行高效的实时操作系统(RTOS),Nuttx提供可移植操作系统接口(POSIX)类型的环境。由3DR联合APM小组与PX4小组于2014年推出的PIXHAWK飞控是PX4飞控的升级版本,拥有PX4和APM(ArduPilot)两套固件和相应的地面站软件,也是目前全世界飞控产品中硬件规格最高的产品。” 好了说人话,目前主流就2种:APM和PIXHAWK。有时指硬件,有时指软件(固件),为了明确,在此做个区分。硬件分2种:APM和PIXHAWK。APM的版本有2.5,2.6和2.8,PIXHAWK的版本有v1和v2。软件也分2种:APM和PX4。软件版本就多了去了,详见github。APM硬件由于存储空间有限,最高支持到3.2.1的APM软件。PIXHAWK硬件是STM32F4,存储空间大,对APM软件(3.2.1之后的版本也支持)和PX4都支持。 APM和PIXHAWK都开源,不过二者遵守的开源协议不同。APM多用于DIY和小型产品,某宝上大量的无人机就采用APM,成本低。公司商用一般采用PIXHAWK。目前很多PIXHAWK里跑的还是APM固件,个人认为有几大原因:1. APM固件出来的更早,使用人群习惯的延续;2. APM固件成熟度更高、资料更全。3. APM固件走开源路线更彻底,遵守GPL V3协议,PX4更倾向商业和实验用途,遵守BSD协议。目前APM小组已和PX4小组分道扬镳,详见新闻:ArduPilot脱离Dronecode真相。
APM固件下载
刚提到APM硬件的最高版本为2.8,现在说说APM固件(源码)的版本。既然是开源项目,那么在github上肯定有仓库。曾经的APM源码存于code.google.com,后来github席卷全球,成为广泛接受的代码仓库,于是谷歌把自己的仓库关了(反正国内也上不去:-()。github上的源头在此:https://github.com/ArduPilot/ardupilot。其中的ArduCopter支持多旋翼、直升机等,四旋翼源码即在其中,但是别急着下载,先点击release看看源码版本。可以看到带Copter的最新版本是“Copter-3.4.0”,带ArduCopter的最新版本是“ArduCopter-3.2.1-apm-px4”,很多朋友直接参照网上的《通过Arduino给APM编译下载最新固件》用git克隆代码到本地,发现无法使用,问题就在于git获取的是最新版,而APM支持的最高版本是“ArduCopter-3.2.1-apm-px4”,从命名也可以发现,该版本固件同时支持APM和PX4。
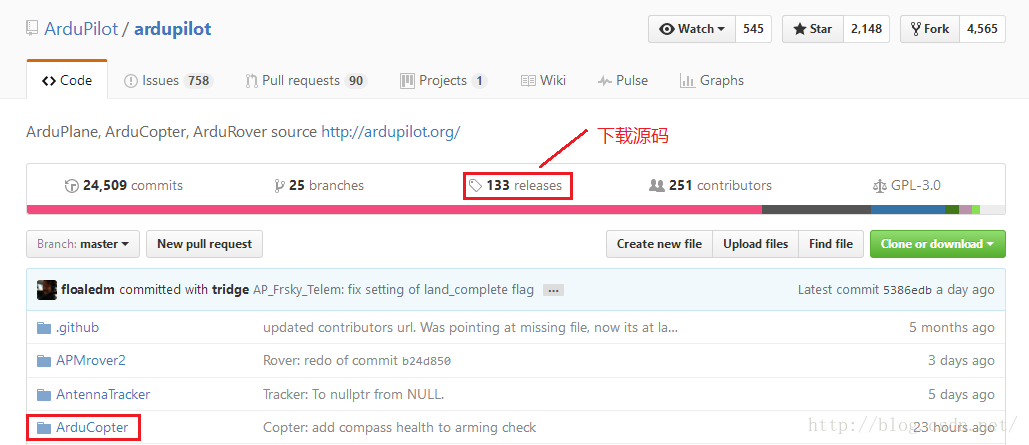
获取ArduCopter-3.2.1版本的源码有2种方式:I. 在github页面点击release,往下翻几页,找到“ArduCopter-3.2.1-apm-px4”下载即可。II. 喜欢git的朋友在克隆最新代码后,也可以回退到3.2.1的版本,与第一种方法获得的源码无异。
git clone https://github.com/ArduPilot/ardupilot.git
cd ardupilot/
git branch -a
git checkout -b arducopter-3.2.1 origin/ArduCopter-3.2.1
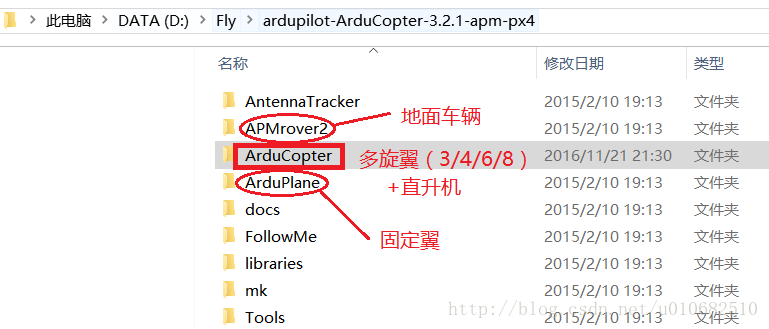
使用方法解压之后就可以看到源码啦,结构如下。其中,APMrover2支持地面车辆,ArduPlane支持固定翼,ArduCopter支持多旋翼和直升机。对于四旋翼的开发,就对应ArduCopter文件夹。值得一提的是,打开ArduCopter文件夹后,可以看到一大波.pde文件,.pde为Arduino文件的旧版后缀,新版的为.ino(Arduino的后3个字母),可以简单类比成.cpp文件。熟悉C++的朋友可能会想去找main文件,这回改头换面了,主文件叫ArduCopter.pde。
APM开发环境
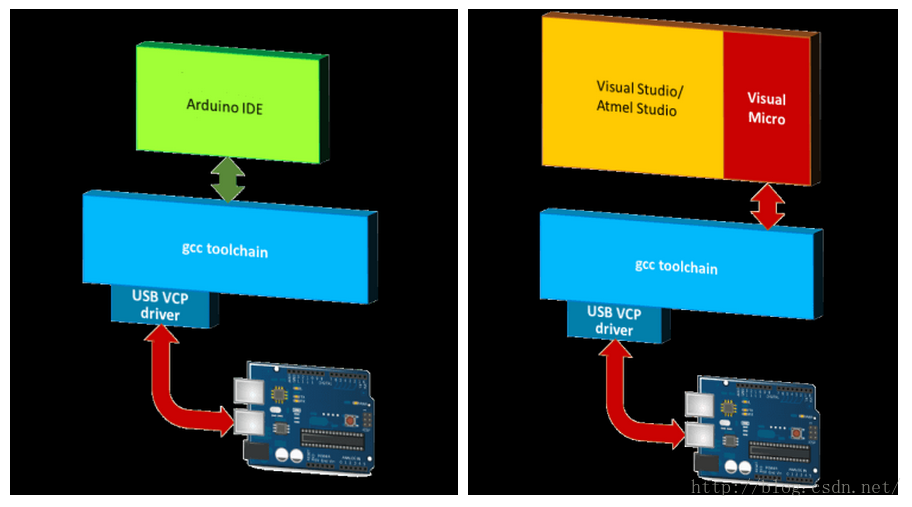
巧妇难为无米之炊”,现在米有了,用什么工具做饭呢。先把火备好,即编译的工具链和驱动:MHV_AVR_Tools_20121007.exe(AVR单片机编译和下载程序用)和MissionPlanner-latest.msi(飞控地面站,含APM的USB接口驱动)。接下来就是用什么灶台做饭了,以Windows平台为例,灶台根据方便程度有2种:I. 土灶:ArduPilot-Arduino-1.0.3-gcc-4.7.2-windows(为ArdupPilot定制的Arduino IDE)。II. 电磁炉:Visual Studio配合Visual Micro插件(Arduino for Visual Studio插件)。二者本质没有区别,可以看到都是调用gcc工具链,Visual Studio只是通过Visual Micro在上层封装了操作接口,便于程序员查看和编写代码。强烈建议使用Visual Studio!!!
环境I(轻量). Arduino IDE
先介绍Arduino派的IDE:ArduPilot-Arduino-1.0.3-gcc-4.7.2-windows,此IDE不同于普通的Arduino IDE,而是为ArdupPilot定制的。解压之后,打开“arduino.exe”,一张白板扑面而来。唯一和飞控有关的就在菜单栏上,相比通用ArduinoIDE多了“ArduPilot”一项。工具栏的“√”是编译,“→”是下载。 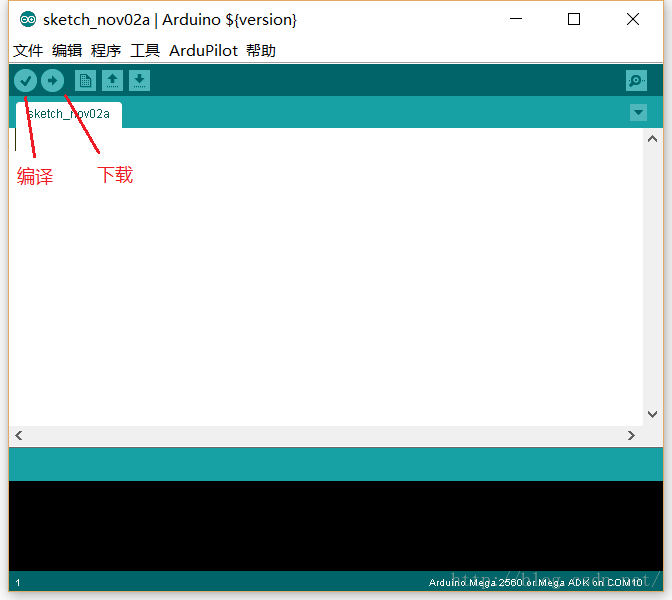
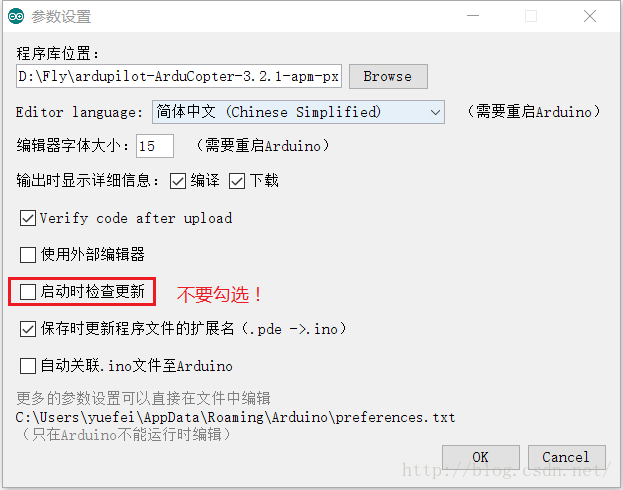
点击“文件->参数设置”,可设置程序库的位置,即APM源码位置,注意不要勾选“启动时检查更新”,因为本IDE专为ArduPilot定制。其他选项可根据个人喜好设置。
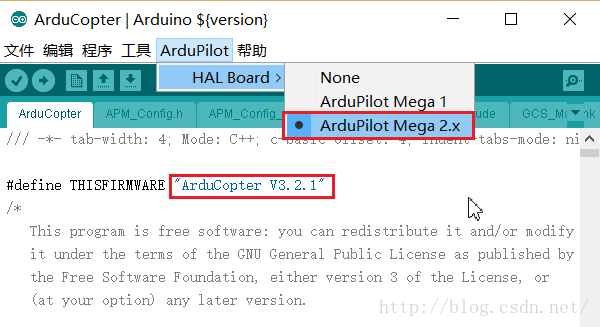
设置完成后退出再重开,以保证程序库位置生效。点击“文件->程序库->ArduCopter”,源代码一览无余。之后配置APM固件,主芯片:“工具->板卡->Arduino Mega 2560 or Mega ADK”,串口:“工具->串口->相应USB串口”(确保驱动已安装),编程器:“工具->编程器->AVRISP mkll”(默认),APM硬件型号:“ArduPilot->HALBoard->ArduPilot Mega 2.x”。
至此,Arduino IDE的完毕,可以点击编译了。等待3分钟左右,编译完毕,生成一个hex文件用于下载到APM板。 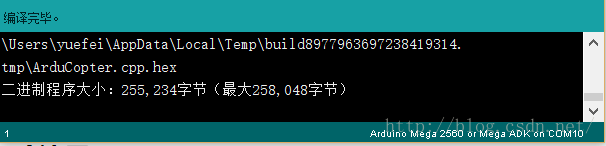
切记:不要下载!不要下载!不要下载!下载会变砖!
环境II(推荐). Visual Studio&Visual Micro
Arduino IDE编译APM的代码还可以,但要是用来浏览和编写代码,那就是千丝万缕扭不清了,所以ArduinoIDE的设置里也机智地留下一条后路:“□使用外部编辑器”。
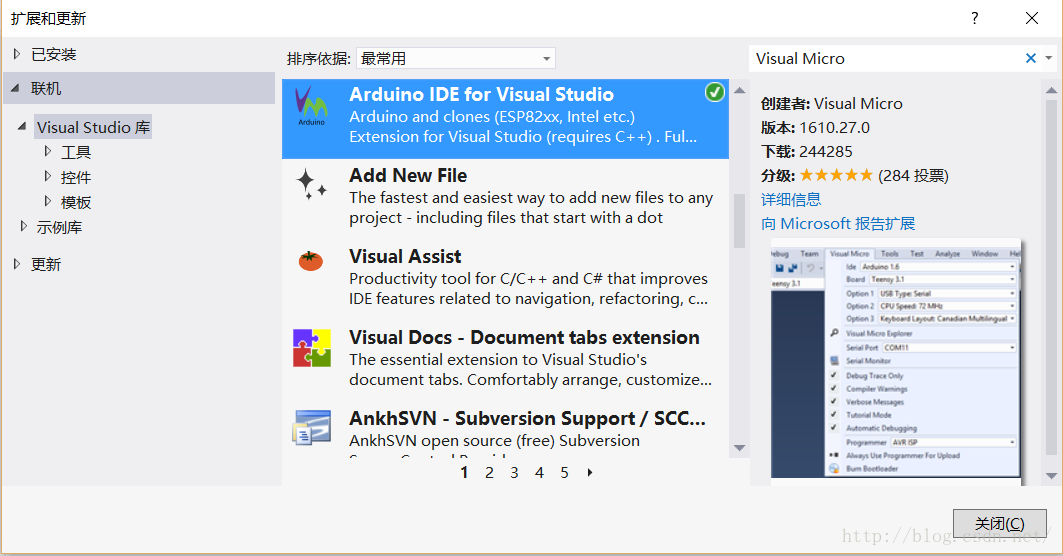
Visual Studio(以下简称VS)作为宇宙最强IDE,怎么能不支持下Arduino,感谢微软救民于水火。以VS2012为例,点击“工具->扩展和更新->联机”,搜索“Visual Micro”,下载安装即可。顺便推荐下Visual Assist,VS下最好的代码补全工具,以前写1行代码的功夫,现在可以写3行~
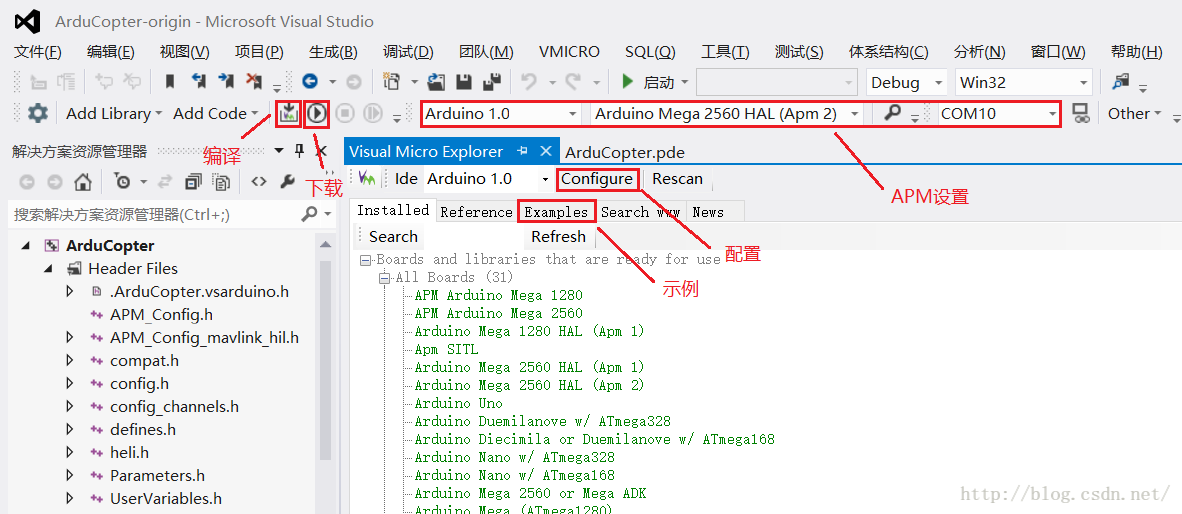
安装好之后,VS的菜单栏多了一些振奋人心的东西。“VMICRO”中可设置Arduino的选项,点击“VMICOR->Visual Micro Explorer”,如下图所示。对比Arduino IDE可发现,编译、下载、COM口应有尽有,还可适配不同的Arduino 版本。
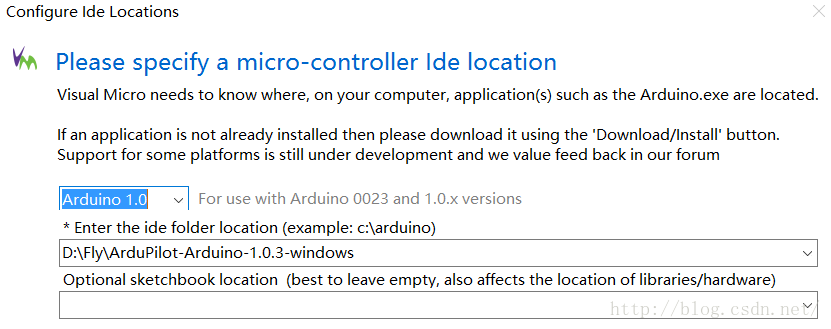
点击“Configure”进行配置,选择Arduino版本:1.0,配置Arduino目录,笔者的是:D:\Fly\ArduPilot-Arduino-1.0.3-windows,即ArduPilot-Arduino-1.0.3-gcc-4.7.2-windows解压后的文件夹。注意此插件的名字是“Arduino IDE for Visual Studio”,并不是专为Ardupilot/APM定制,因此还需适配apm硬件信息(点击蓝字链接下载,解压后为一名为apm的文件夹,内仅含boards.txt)。将该apm文件夹放入D:\Fly\ArduPilot-Arduino-1.0.3-windows\hardware中。配置完成之后,可在“Installed”选项卡中查看支持的硬件类型,如所需的“Arduino Mega 2560 HAL (Apm 2)”,插上APM后在COM口选择对应的串口号。此外,在“Examles”选项卡中可查看Arduino和ArduCopter的例程。
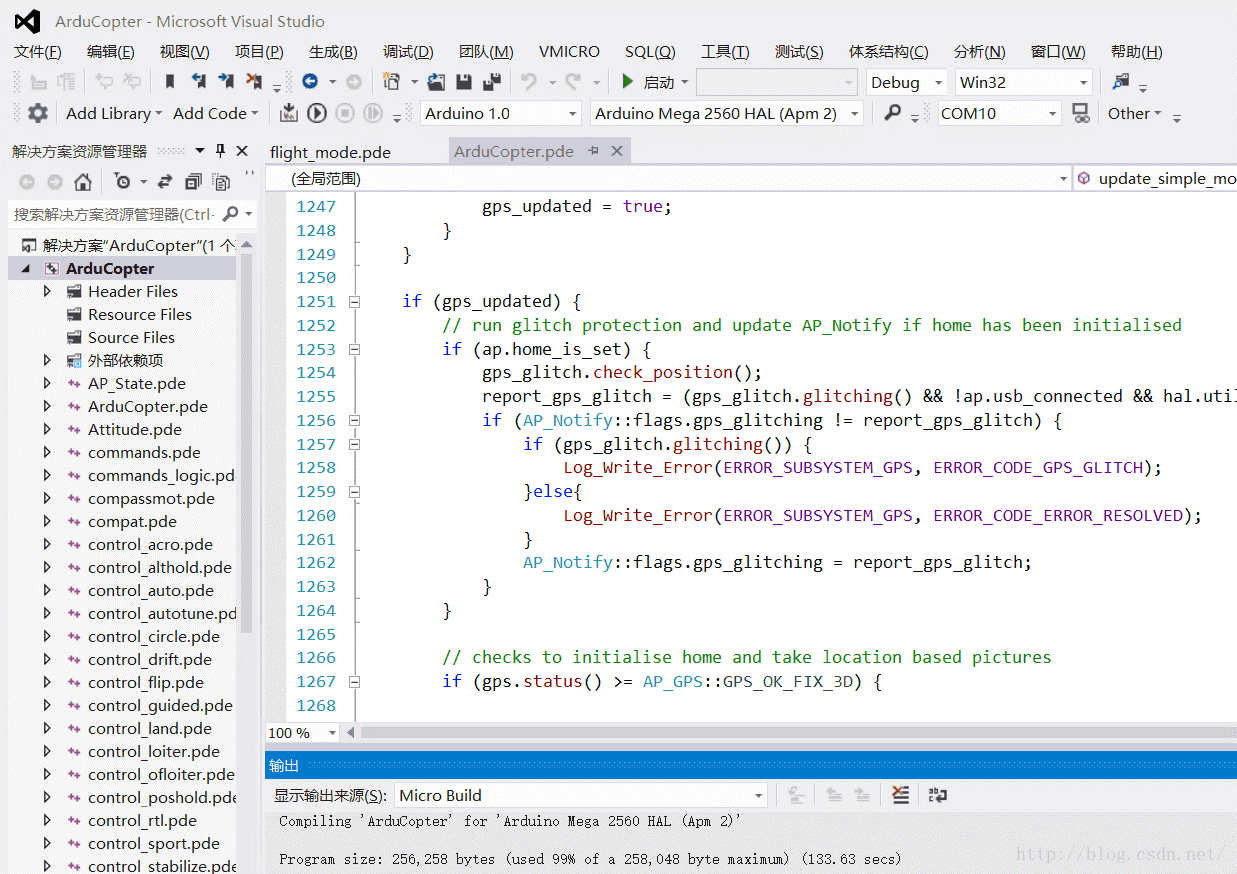
重启VS,点击“文件->打开->Arduino Project”,选择ArduCopter文件夹中的ArduCopter.pde打开,即可在“解决方案资源管理器”中看到APM的源码结构。解释一下,ArduCopter.pde相当于平时常见的Main.cpp,在ArduCopter.pde的最后一行是真正的main函数。
AP_HAL_MAIN();
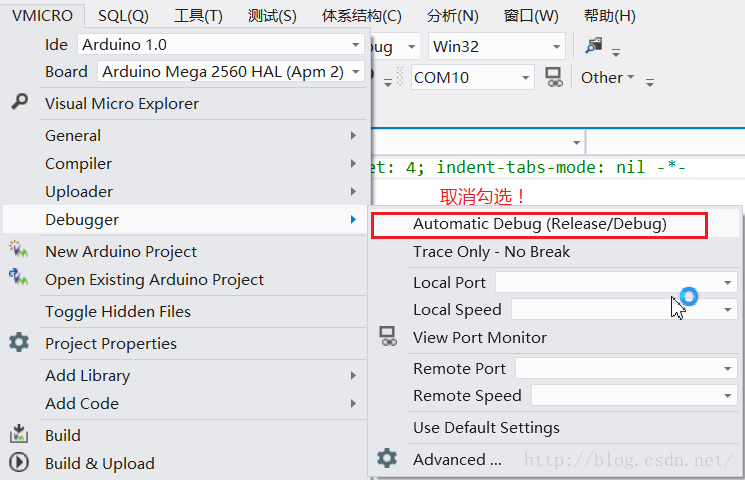
除此之外,有一点需要注意,在“VMICRO”中,“Debugger”取消勾选“Automatic Debug(Release/Debug)”,否则会编译失败。因为APM2.8不支持在线Debug,同时对于“多线程”程序,Debug本身意义不大,一般采用串口print进行调试以便观察程序流程。对于普通Arduino板(如nano)可以勾选,下载后会自动进入调试状态。
至此,Visual Studio&Visual Micro的配置完毕,又可以愉快地编译了。同样等待大概3分钟左右,可以看到编译完成,生成一个hex文件用于下载到APM板。对于编译,第1次会较慢,修改代码再次编译就很快了。
切记:不要下载!不要下载!不要下载!下载会变砖!
在此给出笔者用VS2012编译的工程:APM3.2.1固件-VS2012工程,打开ArduCopter文件夹中的ArduCopter.sln即可使用。如果你好奇心太重点了下载,也没关系,笔者会在下一篇博客让板砖起死回生:)
APM资料说明
有关APM的资料,首推ArduPilot官网:http://ardupilot.org/ardupilot/。如果是开发四旋翼,左侧的“Copter”和“Developers”是你经常要去逛的。里面详细介绍了APM的方方面面,值得反复咀嚼。网上的APM资料,很多就是翻译自ArduPilot官网,但是良莠不齐。不要惧怕英文而选择逃避,蔡康永有一段很有名的话,“15岁觉得游泳难,放弃游泳,到18岁遇到一个你喜欢的人约你去游泳,你只好说"我不会耶”。18岁觉得英文难,放弃英文,28岁出现一个很棒但要会英文的工作,你只好说“我不会耶”。人生前期越嫌麻烦,越懒得学,后来就越可能错过让你动心的人和事,错过新风景。”万事开头难,但也不要放大开头的困难,跨过去就好了。
国内的资料,主要推荐“模友之吧”里“泡泡老师”的视频教程,教你一步步上手APM2.8:[泡泡老师教程] 新手课堂:APM2.8的使用方法。
个人收集的2个资料:新编APM-2.8.0中文入门手册和APM2.8接口介绍。 PS:无人机系列的第3篇至此结束,主要介绍了APM的固件和开发环境搭建,至于为何“不要下载!”,且看下回分解。
| 


 /2
/2 



 发表于 2018-7-17 17:11
发表于 2018-7-17 17:11

 收藏
收藏
