|
|
原帖由 jweufyjhf 于 2007-2-13 19:29 发表
共轴双桨还有一个很重要的好处:气动布局平衡,飞机不需尾桨
非也非也,双桨的直升机飞航线是比较稳定,但是在飞3D(能否飞还待论证)或者急速转弯的时候,双桨的旋转平面,是很容易波动甚至是交叉碰撞的,这一点大家可以买一个那种100多块的共轴双桨小玩具飞机来飞一下,即可明白,我自己就经常在客厅飞这个小玩具,就有这个问题。
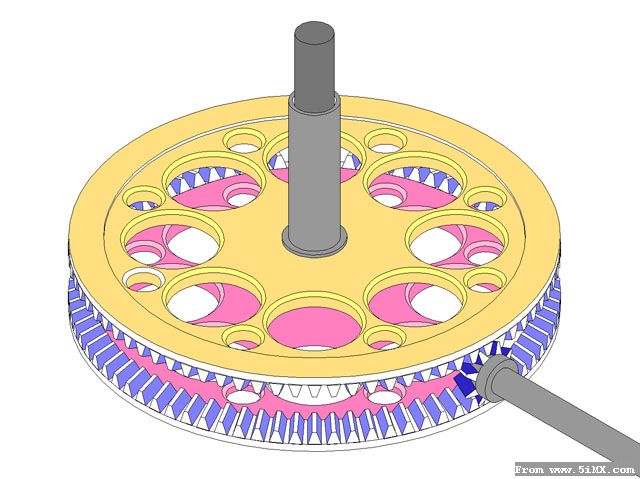
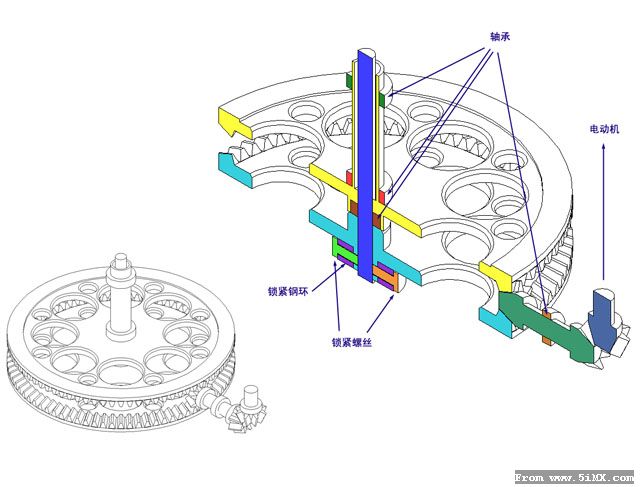
另外一点,不用陀螺?几乎不可能,两个桨、两根轴、两个大齿,不可能加工到完美相同的精度,这个看起来很小的误差,在每分钟数千转的旋转下,产生的差异是非常大的,不可能平衡,还是需要陀螺嘀:em15:
另外再补充一下,共轴双桨要实现3D飞行,我看悬翼头的设计要比较精妙复杂才行,呵呵。改变大桨螺距怎么解决呢?
[ 本帖最后由 bjncut 于 2007-2-13 19:39 编辑 ] |
|



 /1
/1 



 发表于 2007-2-13 09:58
发表于 2007-2-13 09:58

 收藏
收藏
 楼主
楼主