原帖由 stephencsg 于 2005-8-4 22:30 发表
什么是有刷电机......
什么是无刷电机......
有什么区别..........
----------------------------------------------------------------------
无刷直流电动机的组成
与交流电动机相比,直流电动机具有运行效率高和调速性能好等优点。但传统的直流
电动机采用电刷一换向器结构,以机械方式进行换向,不可避免地存在噪声、火花、无线电干扰以及寿命短等致命弱点,再加上制造成本高及维修困难等缺点,大大限制了它的应用范
围,致使目前工农业生产中大多采用三相感应电动机。
那么,能不能既保持直流电动机的优良特性,又去掉机械式换向装置呢?无刷直流电动
机正是在直流电动机的基础上发展起来的一种新型电机。
无刷直流电动机(Brushless DC Motor,简称BLDCM)是一种典型的机电一体化产品,它是由电动机本体、位置检测器、逆变器和控制器组成的自同步电动机系统或自控式变频同步电动机,如图l-l所示。位置检测器检测转子磁极的位置信号,控制器对转子位置信号进行逻辑处理井产生相应的开关信号,开关信号以一定的顺序触发逆变器中的功率开关器件,将电源功率以一定的逻辑关系分配给电动机定子各相绕组,使电动机产生持续不断的转矩。
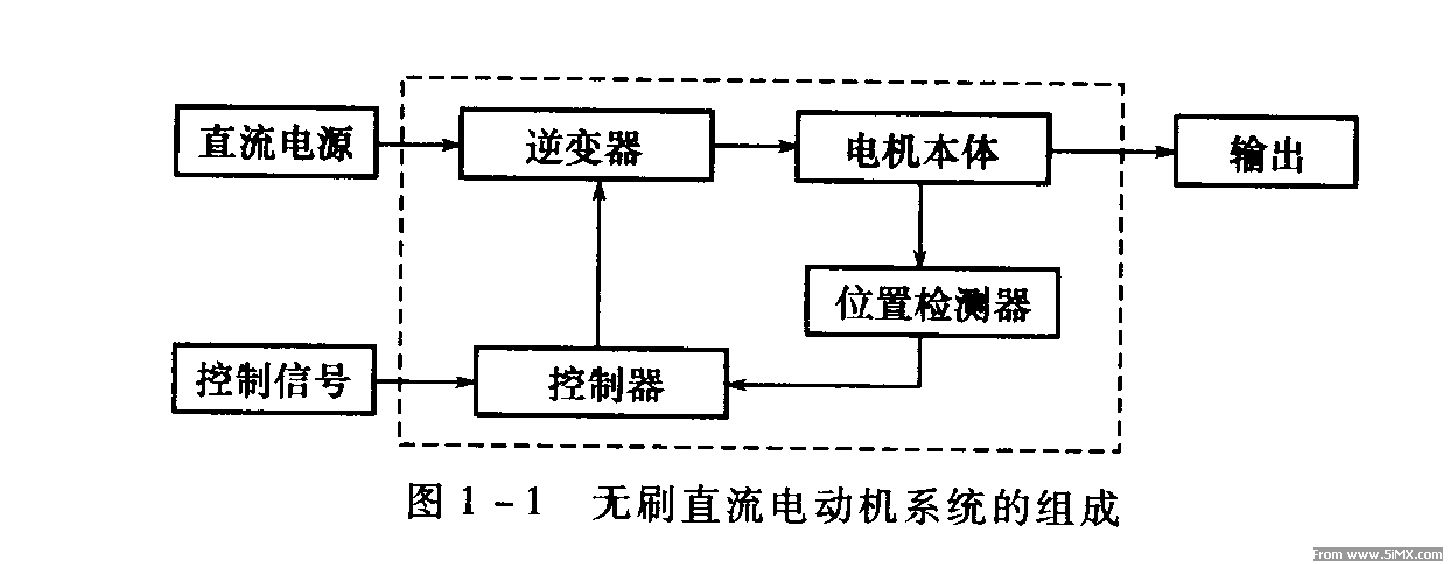
应该指出,对于无刷直流电动机的组成,还存在另一种定义。由于无刷直流电动机最初是从用电子换向取代直流电动机的机械换向发展起来的,从广义电机的角度看,位置检测器和逆变器对应于原直流电动机的机械换向装置,而控制器与原直流电机的部件无法对应,因此,人们习惯上将控制器归到广义电机之外,而认为无刷直流电动机是由电机本体、位置检测器和逆变器三部分组成的。但无刷直流电动机的工作离不开控制系统,控制器已成为无刷直流电动机不可分割的一部分,从这个意义上讲,控制器更应该划入广义电机之中。
下面我们介绍无刷直流电动机各部分的基本结构。
1.电机本体
无刷直流电动机最初的设计思想来自普通的有刷直流电动机,不同的是将直流电动机的定、转子位置进行了互换,其转子为永磁结构,产生气隙磁通;定子为电枢,有多相对称绕组。原直流电动机的电刷和机械换向器被逆变器和转子位置检测器所代替。所以无刷直流电动机的电机本体实际上是一种永磁同步电机,如图l-2所示。由于无刷直流电动机的电机本体为永磁电机,所以无刷直流电动机也称为永磁无刷直流电动机。

定子的结构与普通同步电动机或感应电动机相同,铁心中嵌有多相对称绕组。绕组可以接成星形或三角形,并分别与逆变器中的各开关管相连。三相无刷直流电动机最为常见,以下我们以三相无刷直流电动机为例进行分析。
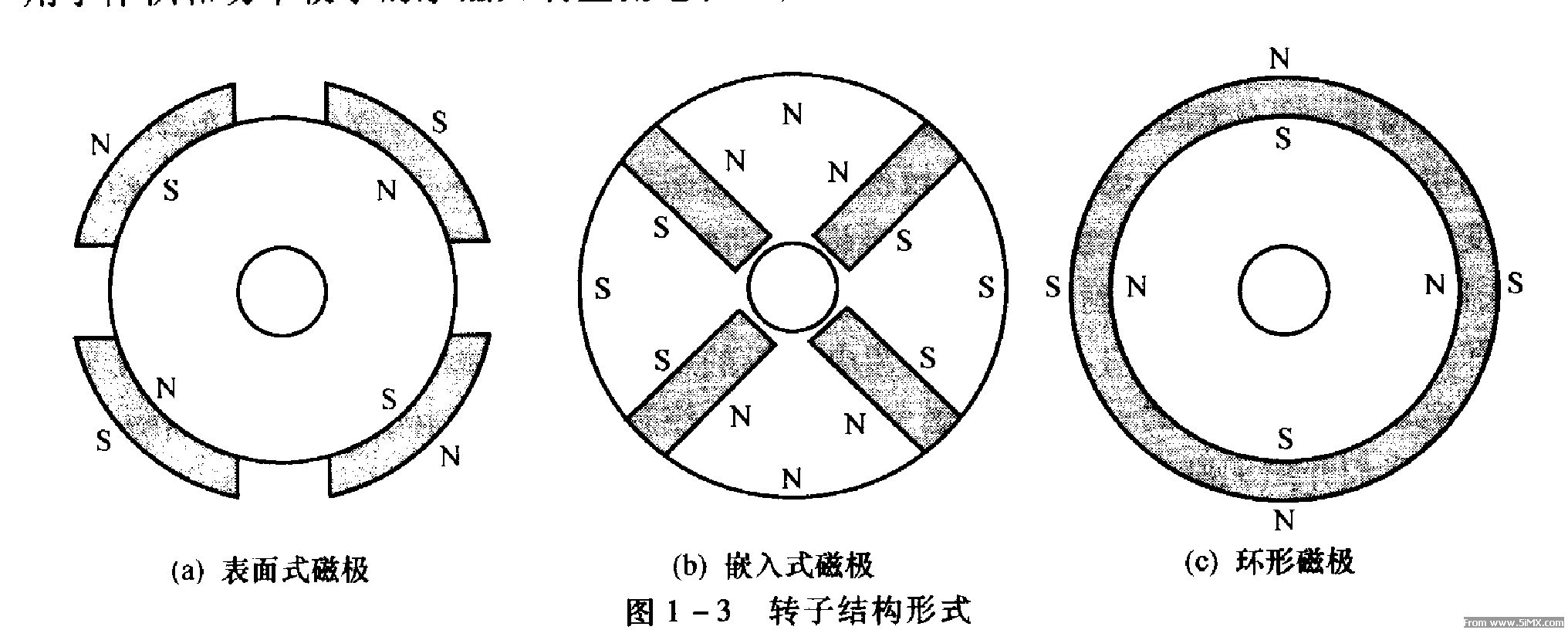
目前,无刷直流电动机中多采用钐钴(SmCo)和钕铁硼(NdFeB)等高矫顽力、高剩磁密度的稀土永磁,其常见的转子结构有三种形式,如图1-3所示。其中图(a)所示的结构是在铁心外表面粘贴径向充磁的瓦片形稀土永磁体,有时也采用矩形小条拼装成瓦片形磁极,以降低电机的制造成本;图(b)所示的结构是在铁心中嵌入矩形稀土永磁体,这种结构的优点是一个极距下的磁通由相邻两个磁极并联提供,可以获得较大的磁通,但这种结构需要作隔磁处理或采用不锈钢轴。对于高速运行的电机,图(a)和(b)所示的结构需在转子外表面套一个0.3-0.8 mm的非磁性紧圈,以防止离心力将永磁体甩出,同时在盐雾等恶劣环境中对永磁体起保护作用。紧圈材料通常采用不导磁的不锈钢,也可用环氧无纬玻璃丝带缚扎。图(C)所示的结构是在铁心外套上一个整体稀土永磁杯,环形磁体径向充磁为多极,适用于体积和功率较小的永磁天刷直流电动机,该种结构的转子制造工艺性较好。
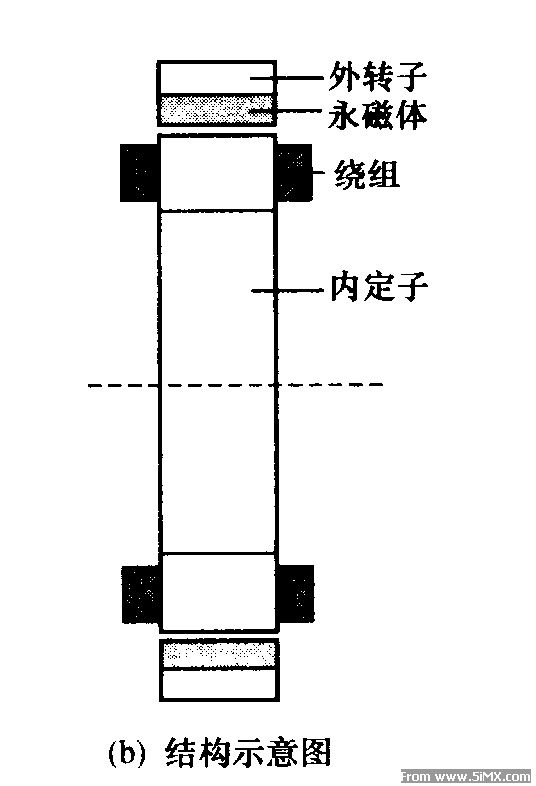
除了普通的内转子无刷直流电动机之外,在电动车驱动中还常常采用外转子结构,将无刷直流电动机装在轮毂之内,直接驱动电动车辆。外转子无刷直流电动机的结构如图1-4所示,其定于绕组出线和位置传感器引线都从电机的轴引出。
2.逆变器
逆变器将直流电转换成交流电向电机供电。与一般逆变器不同,它的输出频率不是独立调节的,而是受控于转子位置信号,是一个"自控式逆变器"。由于采用自控式逆变器,无刷直流电动机输人电流的频率和电机转速始终保持同步,电机和逆变器不会产生振荡和失步,这也是无刷直流电动机的重要优点之一。
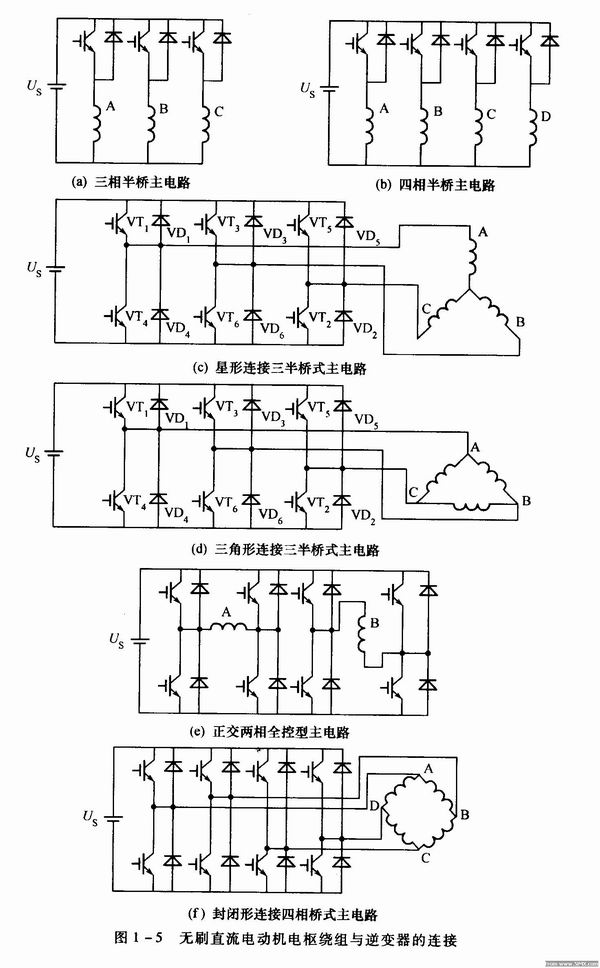
逆变器主电路有桥式和非桥式两种,而电枢绕组既可以接成星形也可以接成角形(封闭形),因此电枢绕组与逆变器主电路的连接可以有多种不同的组合,图l-5给出了几种常用的连接方式。其中,图(a)和图(b)是非桥式(或称为半桥式)主电路,电枢绕组只允许单方向通电,属于半控型主电路;其余为桥式主电路,电枢统组允许双向通电,属于全控型主电路。
目前,无刷直流电动机的逆变器主开关一般采用IGBT或功率MOSFET等全控型器件,
有些主电路已有集成的功率模块(PIC)和智能功率模块(IPM),选用这些模块可以提高系统的可靠性。为了避免重复,本书大部分电路都是以IGBT为例绘制的。
无刷直流电动机定子绕组的相数可以有不同的选择,绕组的连接方式也有星形和角形
之分,而逆变器又有半桥型和全桥型两种。不同的组合会使电动机产生不同的性能和成本,
这是每一个应用系统设计者都要考虑的问题。综合以下三个指标有助于我们做出正确的
选择:
(1)绕组利用率。与普通直流电动机不同,无刷直流电动机的绕组是断续通电的。适
当地提高绕组利用率将可以使同时通电的导体数增加,使电阻下降,效率提高。从这个角度
来看,三相绕组优于四相和五相绕组。
(2)转矩脉动。无刷直流电动机的输出转矩脉动比普通直流电动机的转矩脉动大。一
般相数越多,转矩的脉动越小;采用桥式主电路比采用非桥式主电路时的转矩脉动小。
(3)电路成本。相数越多,逆变器电路使用的开关管越多,成本越高。桥式主电路所用的开关管比半桥式多一倍,成本要高;多相电动机的逆变器结构复杂,成本也高。
因此,目前以星形连接三相桥式主电路应用最多。在下一节我们将详细分析三相无刷
直流电动机逆变器的各种工作方式。
3.位置检测器
位置检测器的作用是检测转子磁极相对于定子绕组的位置信号,为逆变器提供正确的
换相信息。位置检测包括有位置传感器检测和无位置传感器检测两种方式。
转子位置传感器也由定子和转子两部分组成(见图1-2),其转子与电机本体同轴,以
跟踪电机本体转子磁极的位置;其走子固定在电机本体定子或端盖上,以检测和输出转子位
置信号。转子位置传感器的种类包括磁敏式。电磁式、光电式、接近开关式、正余弦旋转变压器式以及编码器等。
在无刷直流电动机系统中安装机械式位置传感器解决了电视转子位置的检测问题。但
是位置传感器的存在增加了系统的成本和体积,降低了系统可靠性,限制了无刷直流电动机
的应用范围,对电机的制造工艺也带来了不利的影响。因此,国内外对无刷直流电动机的光
转子位置传感器运行方式给予高度重视。
无机械式位置传感器转子位置检测是通过检测和计算与转子位置有关的物理量间接地
获得转子位置信息,主要有反电动势检测法、续流二极管工作状态检测法、定子三次谐波检
测法和瞬时电压方程法等。
位置信号的检测方法将在后续章节中详细介绍。
4.控制器
控制器是无刷直流电动机正常运行并实现各种调速伺服功能的指挥中心,它主要完成
以下功能:
(l)对转子位置检测器输出的信号、PWM调制信号、正反转和停车信号进行逻辑综合,
为驱动电路提供各开关管的新波信号和选通信号,实现电机的正反转及停车控制。
(2)产生PWM调制信号,使电机的电压随给定速度信号而自动变化,实现电机开环调速。
(3)对电动机进行速度闭环调节和电流闭环调节,使系统具有较好的动态和静态性能。
(4)实现短路、过流、过电压和欠电压等故障保护功能。
控制器的主要形式有:分立元件加少量集成电路构成的模拟控制系统、基于专用集成电路的控制系统、数模混合控制系统和全数字控制系统。我们将在后续章节中详细介绍控制
器的设计。 |



 /1
/1 



 发表于 2005-8-4 22:30
发表于 2005-8-4 22:30

 收藏
收藏