首先感谢mx牛模王 同学得分享帖
传送门不太方便,我给这篇文章搬过来了,原文如下:
第一人称操控设备在航模上的运用
 第一人称操控又称FPV(First Person View)
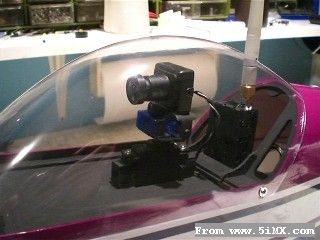
或RPV(RemotePerson View),缘自无线视频监控技术。FPV是国外最新流行起来的一种另类驾驶体验,驾驶者通过观看远程模型摄像头传回的实时影像进行操控,甚至起飞降落全过程不须看模型一眼,象开真飞机一样,给玩家带来非常真实的虚拟驾驶感受。美国影片中经常出现此类镜头,图1图2中的设备就能组成一套《小鬼当家》中出现过的超视距遥控车。
第一人称操控又称FPV(First Person View)
或RPV(RemotePerson View),缘自无线视频监控技术。FPV是国外最新流行起来的一种另类驾驶体验,驾驶者通过观看远程模型摄像头传回的实时影像进行操控,甚至起飞降落全过程不须看模型一眼,象开真飞机一样,给玩家带来非常真实的虚拟驾驶感受。美国影片中经常出现此类镜头,图1图2中的设备就能组成一套《小鬼当家》中出现过的超视距遥控车。

图1

图2
典型的FPV设备由摄像头,发射机,接受机,显示屏及电池构成,国外成品套材如FPV200由视频AV输出线,高灵敏2.4G接收机, 200mW2.4G发射器,电池,摄像头等組成。图3

图3
图4是另一套1.2G500mW的设备

图4
有些如10~50mW小发射功率的往往把摄像和发射模块做为一体,模型端更为小巧但视频传输距离更近。
摄像头是驾驶者在飞机上的眼睛,负责将视觉影像变为视频信号传给发射机,主要参数有传感器类型(ccd/cmos),感光元件尺寸(1/4``或1/3``),制式(PAL/NTSC),最低照度(Lux),电源要求,功耗,水平清晰度, 信噪比,尺寸净重等图5,6,7,8,9,10 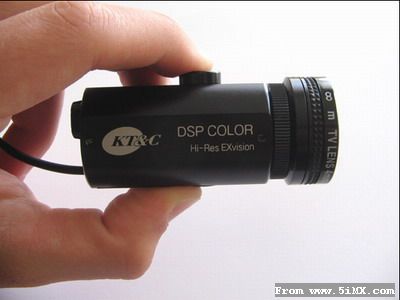
图5

图6

图7

图8
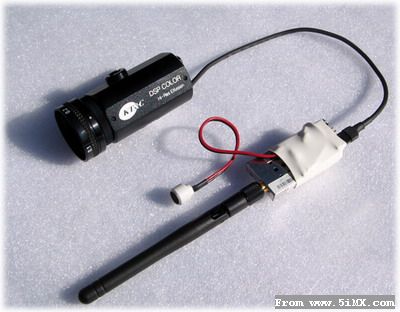
图9

图10
图10是为了减重外壳拆去后的摄像头,另外大多数摄像头是不带音频采集的,可以自行选用音频采集部件图11,就能听到发动机的声音和风的声音了。

图11
选择摄像头大致遵循以下几点,感光元件最好选用ccd的,1/3’’比1/4’’要好,最低照度要低,信噪比要高,水平清晰度要高,制式要和视频监控端所支持的制式相匹配。
发射接收设备负责将视频信号远距离传输,建议选用小型发射器,图12,13,14,15分别是10mW,200mW、500mW和1000mW的小型发射器,
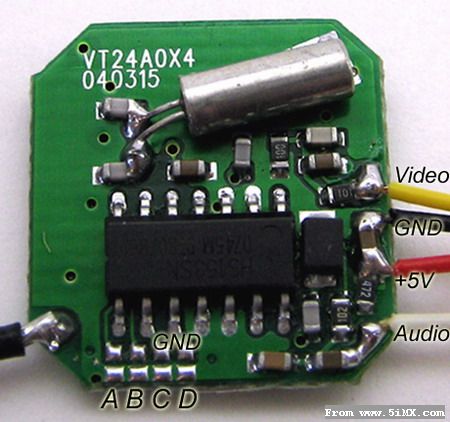
图12

图13

图14

图15
图16,17,18是接收机,参数主要有2个,功率和频段,功率从10mW到3W不等,频率分900MHz,1.2GHz,2.4GHz三段,每段又有若干频点,同一频段的发射机接收机调至同一频点,在一定距离内,就能进行视频音频传输

图16
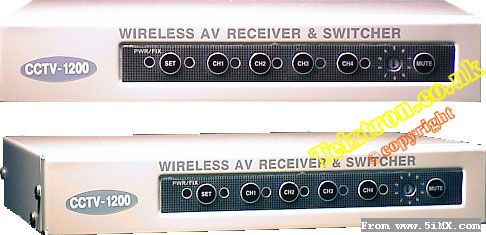
图17

图18
显示器可以采用任何带VIDEO IN(视频输入)功能的显示器如电视机、车载显示器、mp4或视频眼镜,用信号线将接收机输出的视频图像信号直接接到AV输入端子的VIDEO IN端子即可在视频显示器上显示清晰稳定的图像,也能通过视频转换卡输入到VGA显示器如笔记本。需要注意的是制式问题,有PAL和NTSC之分,也有全制式的,但不管怎样应与摄像头制式相匹配。视频眼镜图19,20非常适合在户外强光下使用,如果配合后文提到的头部**更是如虎添翼。

图19

图20
Head tracker头部运动感应器图21图22是FPV的又一项厉器,体验实时的3D视角,只需移动头部就可以控制摄像头俯仰偏航角度。它的原理是测量Head Tracker和地磁场的相对偏角,一旦发现有相对位移,就形成一串PPM信号通过教练口发射给模型,驱动摄像头的俯仰偏航舵机。此外红外感应的head tracker也即将上市。

图21

图22
安装方式是感应块固定在视频眼镜或帽子上,另一端接遥控设备,例如图21,图22中的方口接FUTABA遥控器教练口。初始化时须通过内部“哔哔”声判断是否对准地磁北极,具体操作可参阅厂方说明。
摄像头的俯仰偏航可以非常简易地用两个舵机实现图23,占用遥控设备两通道,

图23
此系统称为pan&tilt系统即偏航俯仰系统,可进一步改装成极限角度更大如180°的伺服机构,可看到机尾,实现360°全方位视角。
Head tracker加上pan&tilt系统弥补了微型摄像机视角不足问题,配合视频眼镜能使驾驶者更大角度、更自由地观察周围的一切,而不用改变航向,另一大好处可以监视飞机自身状况,例如观察某些双侧发动机的运行情况,它可以说是驾驶员的脖子,没了它虽然也能开,但就好比脖子上绑了个石膏在开飞机。
FPV电源分机上电源和地面电源两部分,机上发射机和摄像头一般共用DC12V或DC5V,尽量不要和机上动力遥控设备共用,以免干扰,可选择锂电或镍氢镍镉。地面接收机和显示器可以用DC12V的多种电源。
FPV只是打开了一扇窗,人们已经迫不及待地把真飞机上的很多功能搬上了天,笔者见过用小的真空压力表和指南球做的高度计水平仪仪表盘,小巧实用,平添许多乐趣。FPV也可以进行航拍,但建议利用直升机和可遥控云台的DV设备更好地拍摄。因为FPV主要是用来驾驶的,成像再好与DV的拍摄效果还是有很大差距。图24 |



 /2
/2 



 发表于 2011-12-26 09:37
发表于 2011-12-26 09:37

 收藏
收藏 楼主
楼主