|
|
目前I是记录了20条历史记录,以前全都记录,但后来发现有问题。
修改了串口的代码,可以实时调整参数,不过飞机的升空时间很短,所以基本还是降落后调整的。
目前已经有点眉目了,可以稳定住飞机。但就是需要一点时间和空间。
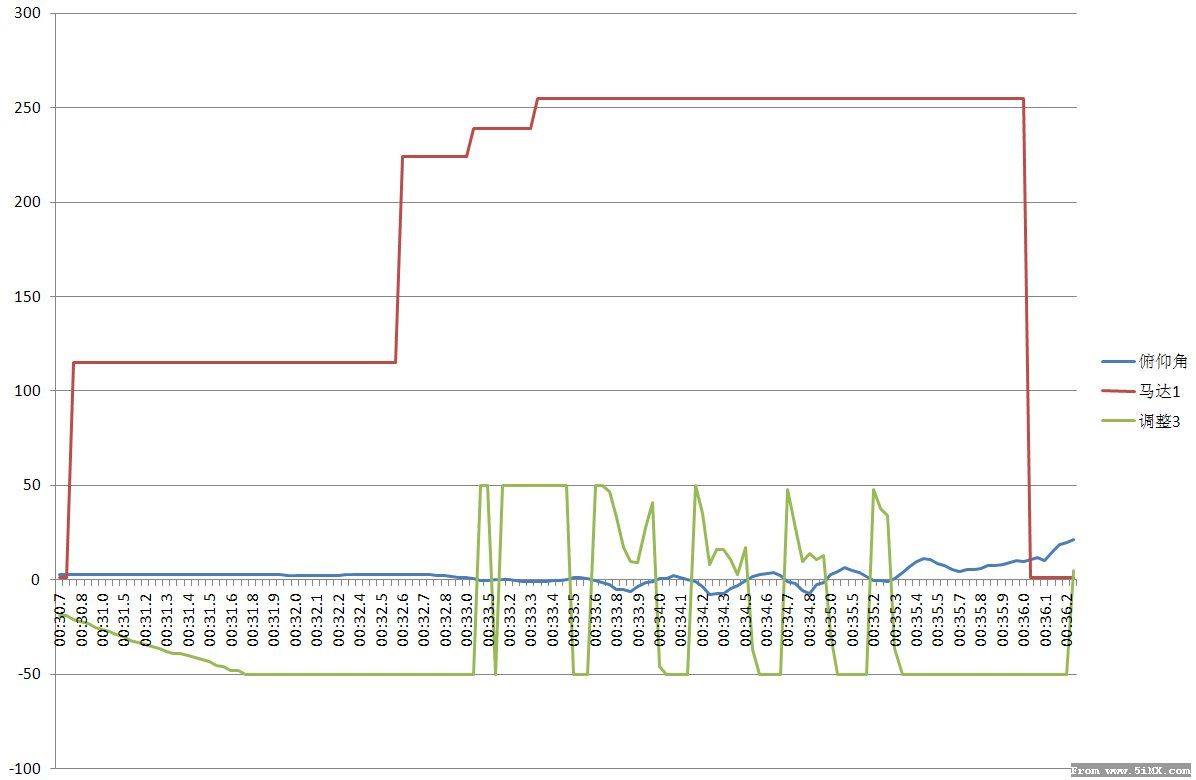
卡尔曼滤波的结果是非常重要的,现在通过加快计算速度来提高精度。
提高了16倍的计算频率,同时降低噪声,目前获得的数据还是比较能够反映当前的飞机状态了。
校准频率维持25Hz不变。
以前做不出的时候,经常不知道问题出在哪里。看记录,飞机姿态也差不多啊,可为什么飞起来很快就往一个方向偏过去了。
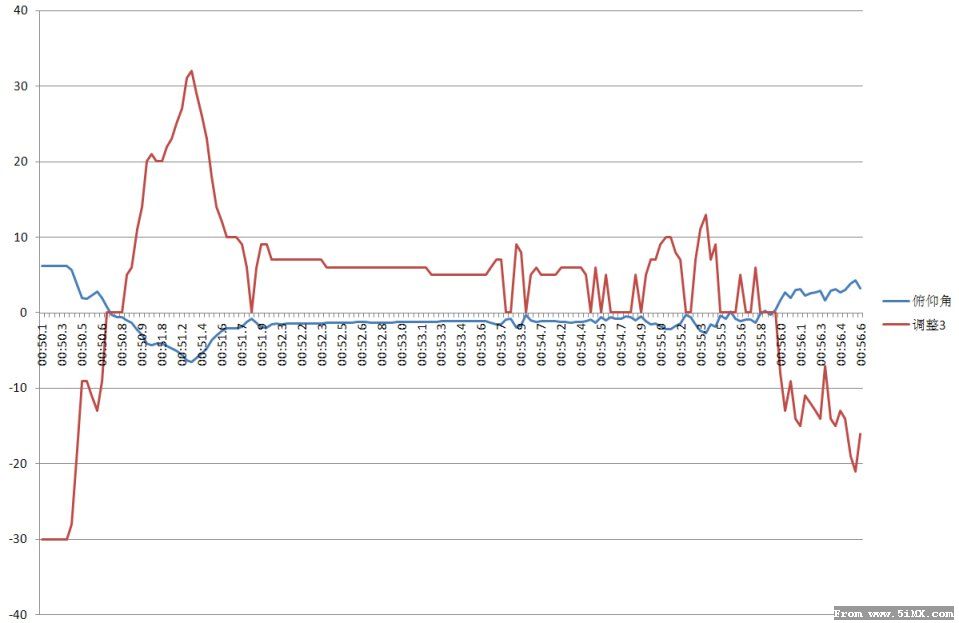
后来发现,卡尔曼滤波器的数据在飞行了一段时间后开始过于发散。明明俯仰角一直是负的,到后来由于数据发散的关系卡尔曼
滤波会给我得出一个正的值,结果飞机就越飞越快了。
现在通过加快计算频率,降低噪音,目的都是减少卡尔曼的数据发散速度。毕竟直升机俯仰角变化不会像固定翼那样快。
目前看起来效果还不错。
[ 本帖最后由 c_nmusic 于 2008-8-13 20:50 编辑 ] |
|



 /2
/2 


 发表于 2008-8-8 15:36
发表于 2008-8-8 15:36
 楼主
楼主