5iMX宗旨:
分享遥控模型兴趣爱好
航模爱好趣无穷,正确操纵是关键。莫把器材当玩具,忽视安全悔一生。
新手好问勤练习,远离人群勿炫耀。天下模友一家人,共建美好新生活。
车贴申请
|公众号与手机端
|帮助
|
积分说明
|
求助
请
登录
后使用快捷导航
没有帐号?
我要加入
手机用户
登录
商城
论坛
收藏
打开手机扫一扫
快捷导航
首页
视频/图赏
新手课堂
5iMX社区
新闻 | 观点
5iMX评测室
5i上头条
【搜索】
5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
»
5iMX社区
›
遥控直升机模型(EP/GP Heli)【技术专栏】
›
电动遥控直升机
›
共轴双桨自动驾驶直升机
1 ...
18
19
20
21
22
23
24
25
26
... 41
/ 41 页
下一页
返回列表
楼主:
c_nmusic
共轴双桨自动驾驶直升机
[复制链接]
c_nmusic
c_nmusic
当前离线
积分
609
421
楼
楼主
|
发表于 2008-8-15 17:53
|
只看该作者
画了一个超级小的(13cm X 21cm),用TinyAVR13做处理器,可以接2芯的电池,直接走充电器的接口。
利用AVR上的ADC通道,可以监控整个电池的电压以及2个电芯的单独的电压。
一共2个红灯,2个绿灯,可以根据需要调整代码实现各种形式的报警功能。
已经送去做了,这么个小东西,做20块不知道够不够开工费呢。
欢迎继续阅读楼主其他信息
主题
共轴双桨自动驾驶直升机(二)之四轴飞行器篇
2009-05-20
请问关于T6C遥控距离变短的问题
2009-02-09
我终于能让火狐100在空中停留5秒钟
2008-09-14
我是这样调整好0704A陀螺仪的
2008-04-27
第一次自己动手安装火狐100
2008-04-16
好赢10A无刷电调接反以后
2008-04-15
看我是怎么找到ENC-03陀螺仪芯片的
2008-04-08
共轴双桨自动驾驶直升机
2008-04-01
没有相关信息
没有相关信息
没有相关信息
【论坛活动大全】
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
422
楼
楼主
|
发表于 2008-8-17 13:01
|
只看该作者
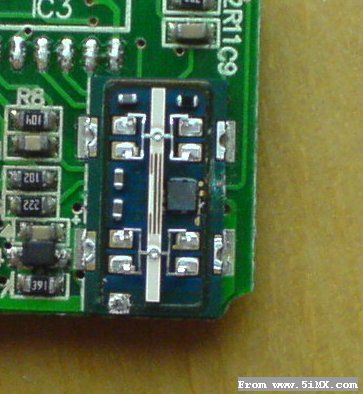
刚才拆坏板子上的ENC-03,结果不小心把上面的金属盖给拆下来了。
因为有的板子把ENC-03用胶给粘在电路板上,光把焊锡吹化了还取不下来。
ENC-03的内部结构,还挺复杂的,有芯片,机械组件,电阻,电容,电路板。
都齐了。
【论坛帮助】
回复
举报
liewenchen
liewenchen
当前离线
积分
1786
423
楼
发表于 2008-8-17 21:28
|
只看该作者
enc-o3好象不是硅的,漂移可能大些,还有启动姿态可能还是要GPS辅助,因为是个不稳定系统,你的方案只能控制加速度,对于一次常数变量必须要GPS辅助,
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
424
楼
楼主
|
发表于 2008-8-17 22:16
|
只看该作者
很大的一个问题就是GPS室内没有信号,而且LAMA室外抗风性能很糟糕。另外现在姿态控制主要依靠加速度计计算倾角,相比固定翼,LAMA出现快速加速的情况并不多见。陀螺仪只是提供一个大致的参考。
ENC-03的漂移是挺大的,已经试验过了。不过我并没指望能做到100%不漂移,我只是想看看这些便宜的传感器到底能做到多好。
尽力而为吧。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
425
楼
楼主
|
发表于 2008-8-18 11:30
|
只看该作者
目前抑制前后漂移的部分大部分比较正常了,可以在短时间内发现倾角变化,判断出正在向前飞行,调整舵机在2秒内将飞机停住。
但新的问题又出现了:由于这个“刹车”动作比较“快”,飞机会产生一个向后仰的状态,然后才会恢复到平衡。
目前的代码,会认为这个向后仰是飞机要向后飞了,于是调整舵机到向前飞行的状态。虽然后面的平衡状态会让舵机撤销修正,但本身飞机就由于重心不大稳容易前飞,于是刚被修整的姿态又重新出现。
目前就是这样前飞一下,停一下,然后又前飞一下。
看来还需要一些类似状态机的东西,简单的PID控制起来还是有些缺陷的。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
长庚明月123
长庚明月123
当前离线
积分
2794
426
楼
发表于 2008-8-18 14:51
|
只看该作者
"状态机"? 高科技阿;我每日一读,楼主太强了
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
427
楼
楼主
|
发表于 2008-8-18 15:15
|
只看该作者
回复 #427 长庚明月123 的帖子
那个不是个实际的机器,只是一种算法。
不要想复杂了,其实算法很简单的。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
428
楼
楼主
|
发表于 2008-8-18 17:31
|
只看该作者
先上一段今天稍微早点的视频:
这个时候只做了前后的自动平衡,效果还不错。漂移不大,在床的中间位置起飞。
要不是到后面遇到被子阻挡把气流扰乱了,还会比较稳定的飞下去。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
429
楼
楼主
|
发表于 2008-8-19 10:33
|
只看该作者
这是今天拍的,屋里空间不是很大,气流干扰比较明显。
特别是开始离地高度不够,没有摆脱地效的时候。
目前这种被气流拖着产生的漂移比较难纠正,因为飞机倾角变化非常小,不容易和振动区分开。
还有一段,不过是晚上拍的,光线不大好。
目前平衡先做到这个程度吧,如果不飞航线,光在一个地方呆着,想不受气流影响对LAMA来说恐怕很难。目前刚起飞时5秒内还是挺稳的。
下面准备多加些控制,比如自己给我飞个8字出来。
[
本帖最后由 c_nmusic 于 2008-8-19 21:16 编辑
]
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
失速飞行
失速飞行
当前离线
积分
1494
430
楼
发表于 2008-8-19 14:09
|
只看该作者
越来越像样子了
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
gsoft
gsoft
当前离线
积分
624
431
楼
发表于 2008-8-19 17:01
|
只看该作者
重在坚持:)
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
432
楼
楼主
|
发表于 2008-8-19 19:41
|
只看该作者
目前看起来,想要飞出动作,比如飞8字等按照一定顺序完成动作,本身并不复杂。
复杂的问题是飞机并不知道自己当前的位置,有很大的可能起飞完成后机头正冲着衣柜,
如果这时开始飞动作那就只有一头撞上去了。
看来要磁阻传感器出场了。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
失速飞行
失速飞行
当前离线
积分
1494
433
楼
发表于 2008-8-19 23:04
|
只看该作者
LZ下一步估计要搞地形匹配导航系统了,整个一巡航导弹
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
shigy
shigy
当前离线
积分
1644
434
楼
发表于 2008-8-20 10:24
|
只看该作者
牛人
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
michaelzyh
michaelzyh
当前离线
积分
3082
435
楼
发表于 2008-8-20 13:14
|
只看该作者
一口气读完,顶一下!
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
436
楼
楼主
|
发表于 2008-8-20 13:42
|
只看该作者
刚才焊了新到的电路板中的GPS板,不出所料,板上的陶瓷天线果然不好使。
这种超过1G频率的天线布线果然不是那么容易搞定的,看来下次需要买个成品天线来“盗版”一下了。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
437
楼
楼主
|
发表于 2008-8-21 14:35
|
只看该作者
昨天和今天都在调试摄像头板,由于芯片的差异,花了我不少时间呢。
以前用的AT91SAM7S256,I2C如果没有收到相应,会一直重发数据。
而我用在摄像头板上的AT91SAM7SE512,却会给我设置一个NACK标记后告诉我传输完成。
晕倒啊,折腾了好一阵子,终于能成功设置摄像头芯片了。
上个图,我的摄像头板:
[
本帖最后由 c_nmusic 于 2008-8-21 15:34 编辑
]
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
438
楼
楼主
|
发表于 2008-8-21 17:56
|
只看该作者
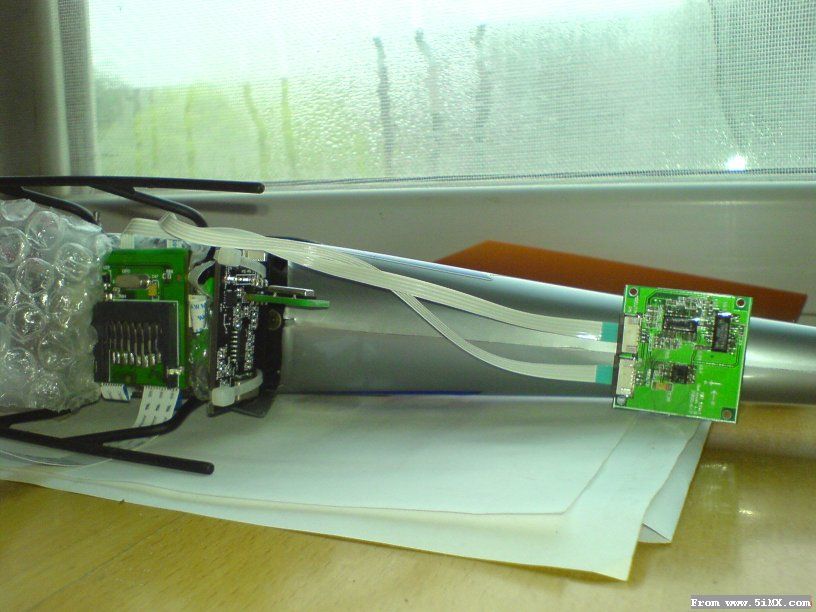
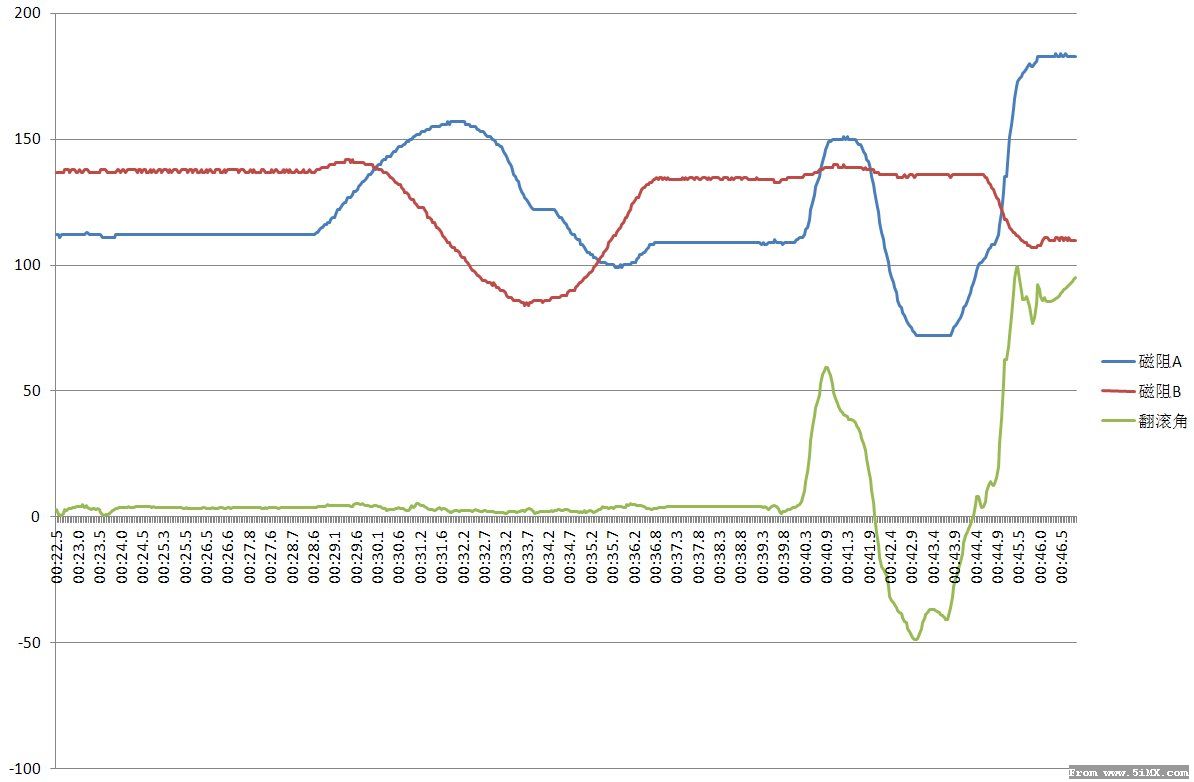
加装了磁阻传感器:
效果还可以,我把飞机顺时针转了个圈,可以看到传感器可以正确地指出飞机的当前位置。
不过由于安装的位置的关系,如果飞机有倾斜的话,那么传感器的指向就会发生偏转。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
hanzhujiao
hanzhujiao
当前离线
积分
980
439
楼
发表于 2008-8-21 18:01
|
只看该作者
楼主加油啊!!!!小LAMA,大智慧!建议采用集成共用的方法减轻重量(我不懂具体怎么做,呵呵),LAMA实在太小.虽然现在还不懂,但也要顶起.将来选专业必选与电子有关的
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
hanzhujiao
hanzhujiao
当前离线
积分
980
440
楼
发表于 2008-8-21 18:02
|
只看该作者
强烈关注,每天必看!
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
1 ...
18
19
20
21
22
23
24
25
26
... 41
/ 41 页
下一页
返回列表
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以回帖
登录
|
我要加入
本版积分规则
发表回复
回帖后跳转到最后一页
浏览过的版块
积分商城
电动遥控固定翼
帆船、气垫及其他船模型讨论区
军卡与坦克仿真模型
航海模型综合讨论区
关闭
【站内推荐】
/2
德国ScaleArt发布MB-trac 1800 1/14比例拖拉机模型
2025年10月,德国殿堂级功能仿真模型制造商ScaleArt宣布推出基于梅赛德斯奔弛MB-trac 1800经典拖拉机的1/14比例仿真液压模型。
查看 »
4K/120帧,大疆最新O4数字图传体验
DJI天空端已经来到了第四代,每次迭代都带来了新的体验。O4相较于O3高度降低了1.5mm,重量轻了7g,具备4K/120帧拍摄能力…
查看 »
快速回复
返回顶部
返回列表



 /2
/2 


 楼主
楼主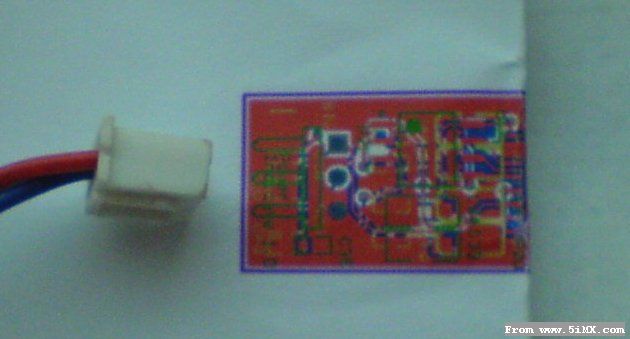
 发表于 2008-8-17 21:28
发表于 2008-8-17 21:28