|
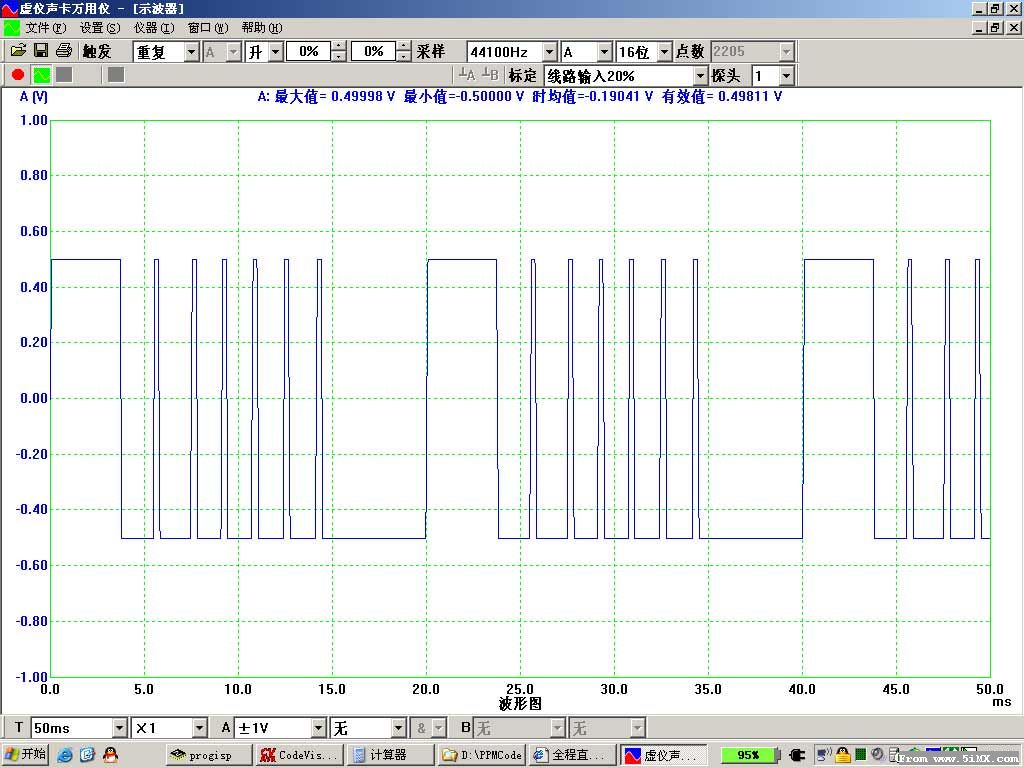
看了两位的进展,我又开始心动了,我也准备开始弄,以前照OURAVR上那位老大的4VF改装画了块PCB,但没有成功,不知那位老大的LCD控制器是什么型号,后来放弃了,对程序又不太懂,现在才开始学,昨天打的PCB已经回来,还没有贴零件,我以前在电子玩具厂搞电子设计,时间很多,那时开始学AVR,我对航模很感兴趣,但对PPM的遥控器编码到现在都还没有想出是如何编,我的想法是,先AD转换8个通道的数据,如用10位AD,那么每通道最大数据是1024,定时器设2US计数,刚好2MS一通道,每帧设为固定的20MS,那么减去8通道的总值,那么同步脉冲就是4MS,总值是动态的,在8MS到16MS变化,同步脉冲也在12到4MS变化,那么每帧就固定为20MS,同步脉冲只要大于3MS就能正确的被解码识别,我就是这么理解的,但程序的流程还搞不清楚,只有慢慢搞,我只懂一点AVR 的汇编,正在学C编程, |



 /2
/2 


 发表于 2007-3-29 23:04
发表于 2007-3-29 23:04
 楼主
楼主