|
|
代码是可以优化的,现在还够用。将来可以换ARM7系列的芯片,有256K Flash呢。
今天发现还是应该比较固定地调整中立点的位置效果最好,而且算法最简单。就是在AD的基础上增加一些数值,相当于将0点移动,就可以明显地抑制自旋了。好像遥控器上的中立点调谐旋钮。以前想的那些自动的算法要么没效果要么越调越乱套。
目前的问题是,很难找到一个不变的数值。随着电池电量变化,这个值变来变去。而且如果悬停时间超过5秒,还会以非常慢的速度开始旋转。
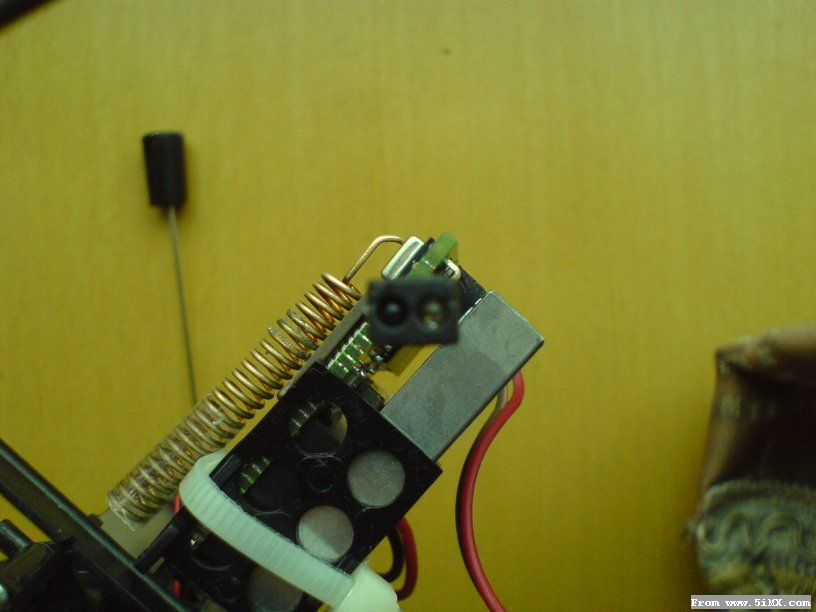
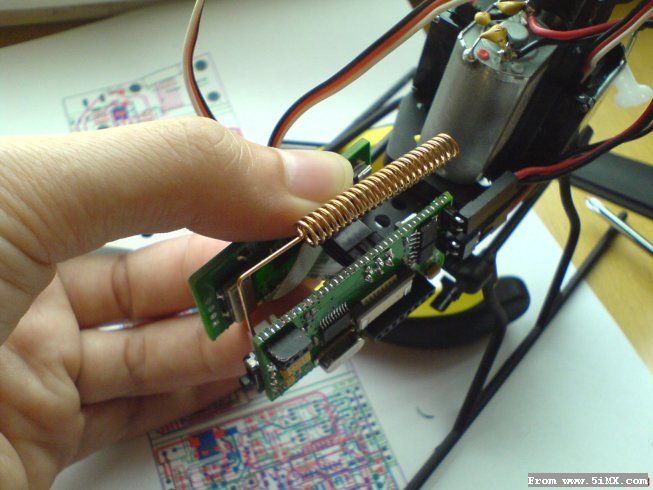
明天准备加一个光电传感器上去,看看能不能自动起飞然后给我自动维持高度。这样我好专心调整中立点。现在还要不断地调整高度避免撞墙,忙不过来了。等到调整差不多了,可以让程序记录下什么电压时采用什么数值,用查表的算法实现最简单的人工智能。
[ 本帖最后由 c_nmusic 于 2008-5-18 22:05 编辑 ] |
|



 /2
/2 


 楼主
楼主 发表于 2008-5-17 23:05
发表于 2008-5-17 23:05