打开手机扫一扫
欢迎继续阅读楼主其他信息
举报
原帖由 lijunmail 于 2008-6-3 15:05 发表 一口气看完十楼,发现。。。不知道楼主要干什么。。。 用电脑遥控和用控遥控没有什么不同吧?直接用电脑生成PPM信号通过高频头发射出去不也一样么。。。 如果要做自动控制平衡仪的话,也少不了遥控器吧?
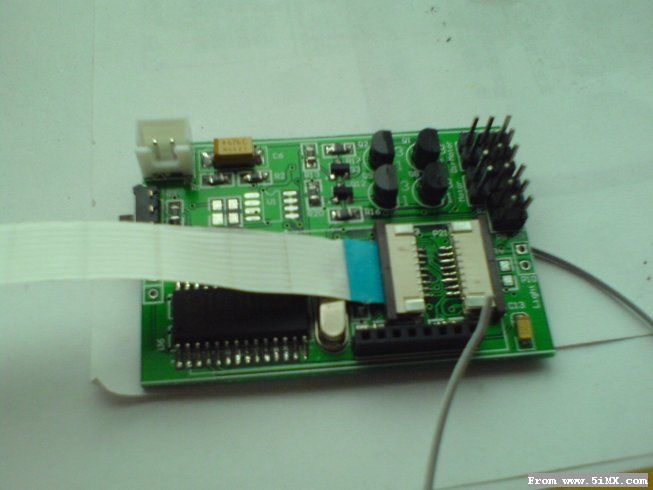
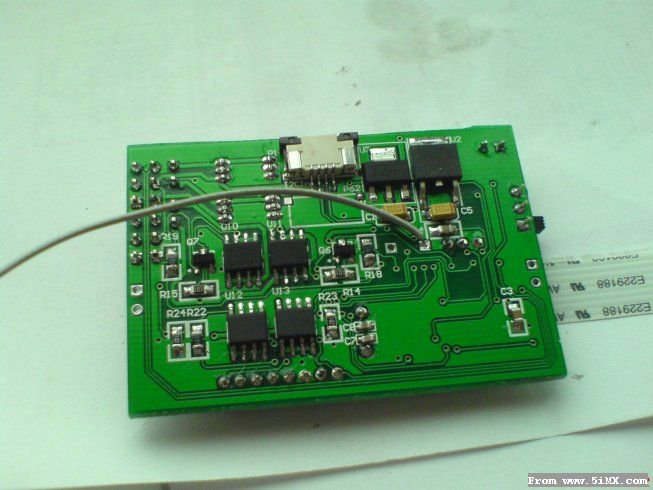
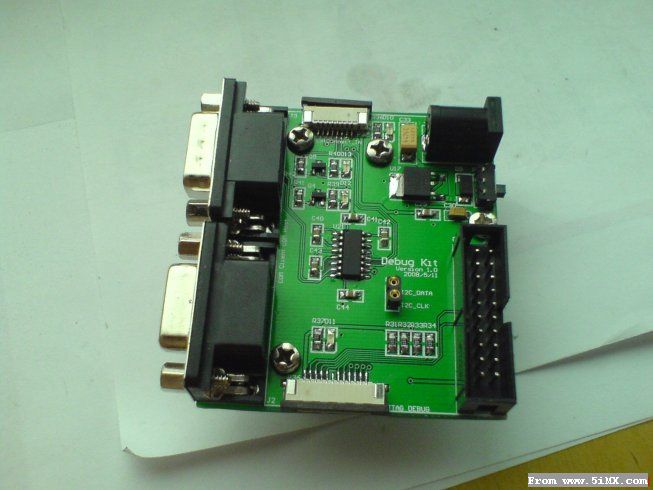
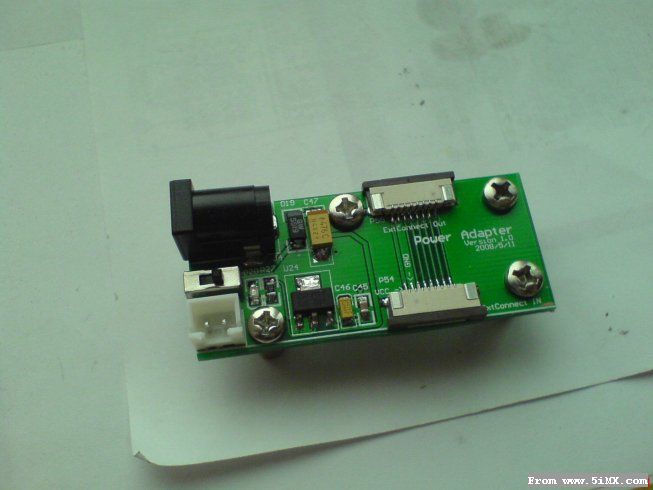
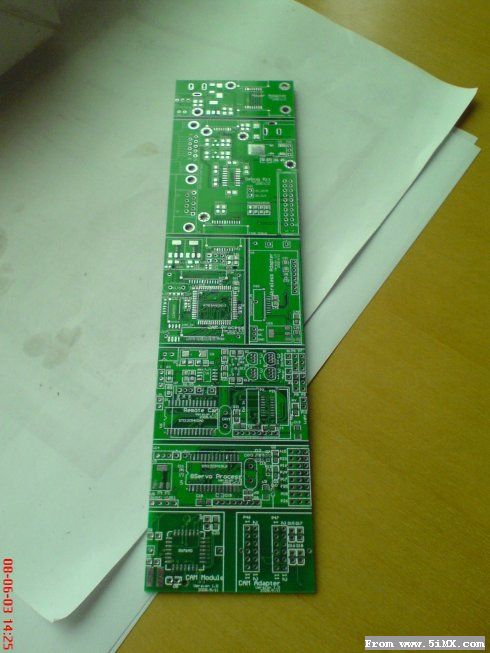
原帖由 c_nmusic 于 2008-6-3 14:50 发表 新版子到了,手工锯开后焊了几块。 有一块是针对遥控汽车设计的,其实飞机都能飞了,汽车跑起来根本不是问题。 不过既然针对目前几种主流类型的电直的驱动板都有了,顺便也就画一个给遥控汽车的也无妨。 ...
原帖由 johnfen 于 2008-6-4 09:33 发表 顶!感觉车用的比较有实用性,可以用PC控制智能小车,能做不少事情 楼主拼那么多块板打样,PCB厂竟然没有意见?
原帖由 djboy2111 于 2008-6-10 23:20 发表 看楼主锯板这么辛苦真不忍心,我对电子不懂,加工还是懂一点的。有一种叫勾刀的工具,一般用来划压克力板的,估计对线路板也很顺手。
查看全部评分
本版积分规则 发表回复 回帖后跳转到最后一页
查看 »



 /2
/2 


 楼主
楼主





 发表于 2008-6-3 15:05
发表于 2008-6-3 15:05


